 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQueueing Network Controls via Deep Reinforcement Learning
Paper and Code
Aug 27, 2020

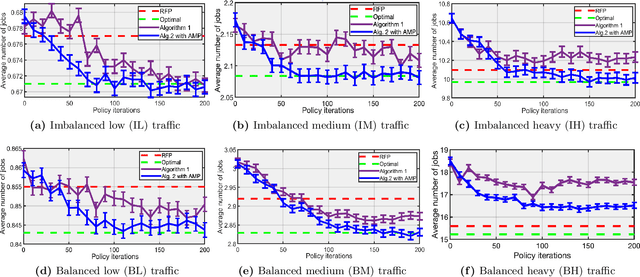
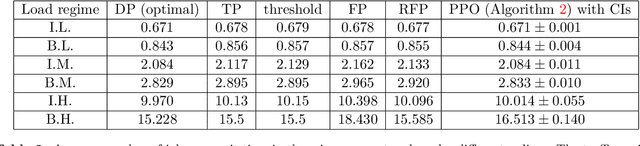
Novel advanced policy gradient (APG) methods, such as Trust Region policy optimization and Proximal policy optimization (PPO), have become the dominant reinforcement learning algorithms because of their ease of implementation and good practical performance. A conventional setup for notoriously difficult queueing network control problems is a Markov decision problem (MDP) that has three features: infinite state space, unbounded costs, and long-run average cost objective. We extend the theoretical framework of these APG methods for such MDP problems. The resulting PPO algorithm is tested on a parallel-server system and large-size multiclass queueing networks. The algorithm consistently generates control policies that outperform state-of-art heuristics in literature in a variety of load conditions from light to heavy traffic. These policies are demonstrated to be near-optimal when the optimal policy can be computed. A key to the successes of our PPO algorithm is the use of three variance reduction techniques in estimating the relative value function via sampling. First, we use a discounted relative value function as an approximation of the relative value function. Second, we propose regenerative simulation to estimate the discounted relative value function. Finally, we incorporate the approximating martingale-process method into the regenerative estimator.