 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeQuadruped Locomotion on Non-Rigid Terrain using Reinforcement Learning
Paper and Code
Jul 07, 2021
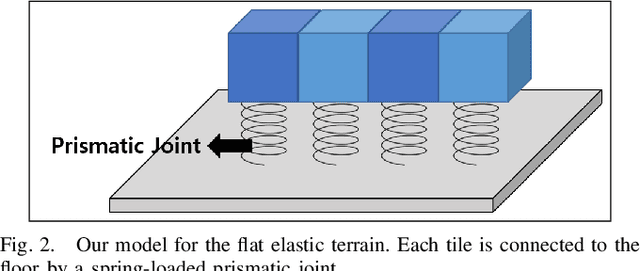
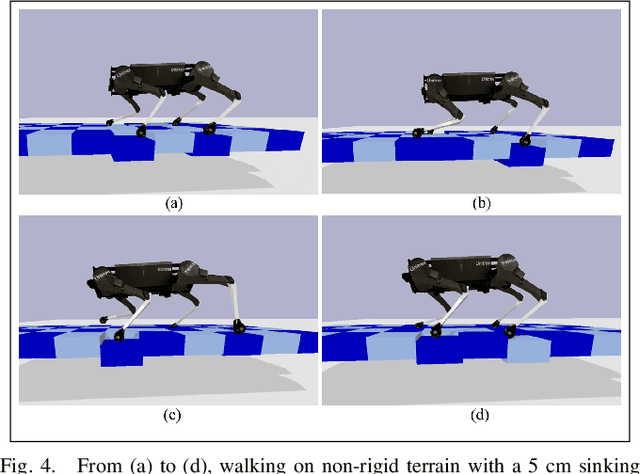
Legged robots need to be capable of walking on diverse terrain conditions. In this paper, we present a novel reinforcement learning framework for learning locomotion on non-rigid dynamic terrains. Specifically, our framework can generate quadruped locomotion on flat elastic terrain that consists of a matrix of tiles moving up and down passively when pushed by the robot's feet. A trained robot with 55cm base length can walk on terrain that can sink up to 5cm. We propose a set of observation and reward terms that enable this locomotion; in which we found that it is crucial to include the end-effector history and end-effector velocity terms into observation. We show the effectiveness of our method by training the robot with various terrain conditions.