 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePushing Fast and Slow: Task-Adaptive Planning for Non-prehensile Manipulation Under Uncertainty
Paper and Code
Jan 21, 2019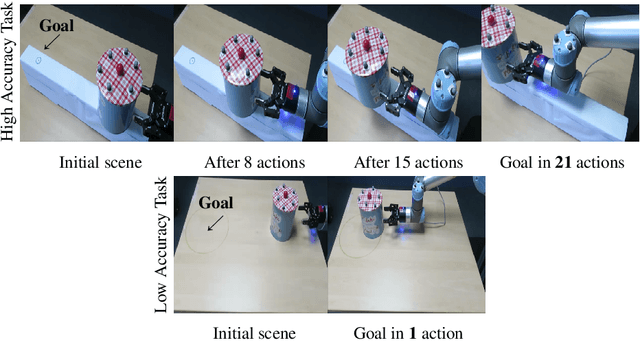
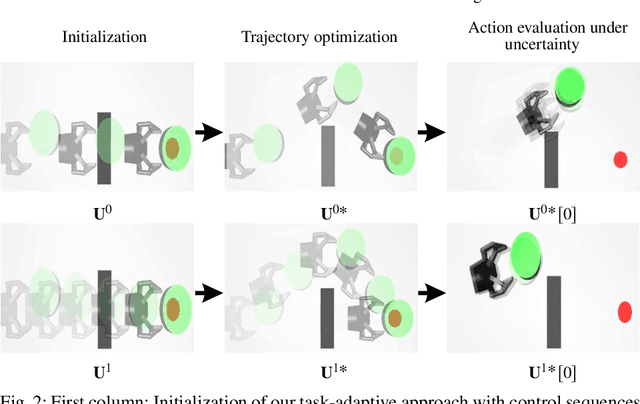
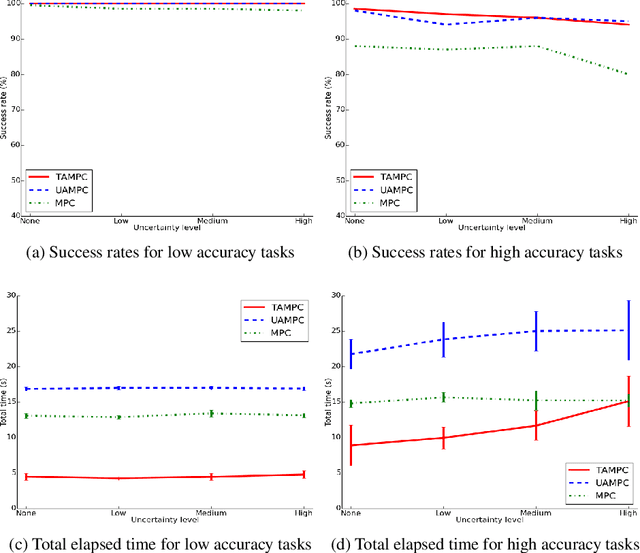
We propose a planning and control approach to physics-based manipulation. The key feature of the algorithm is that it can adapt to the accuracy requirements of a task, by slowing down and generating `careful' motion when the task requires high accuracy, and by speeding up and moving fast when the task tolerates inaccuracy. We formulate the problem as an MDP with action-dependent stochasticity and propose an approximate online solution to it. We use a trajectory optimizer with a deterministic model to suggest promising actions to the MDP, to reduce computation time spent on evaluating different actions. We conducted experiments in simulation and on a real robotic system. Our results show that with a task-adaptive planning and control approach, a robot can choose fast or slow actions depending on the task accuracy and uncertainty level. The robot makes these decisions online and is able to maintain high success rates while completing manipulation tasks as fast as possible.