 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePush and Drag: An Active Obstacle Separation Method for Fruit Harvesting Robots
Paper and Code
Apr 20, 2020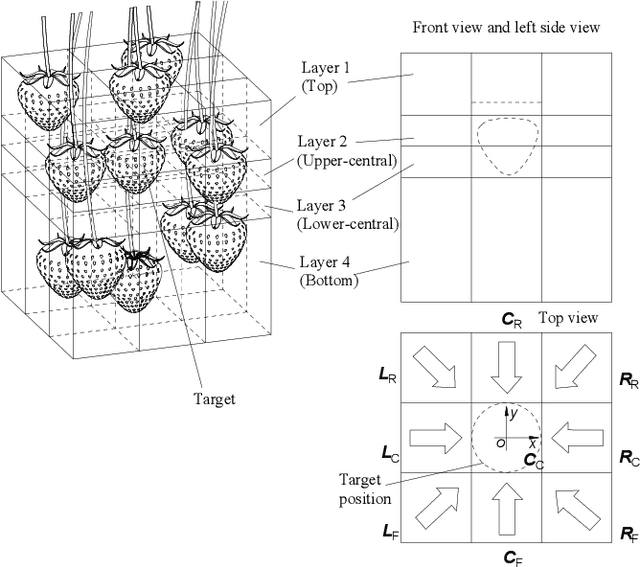
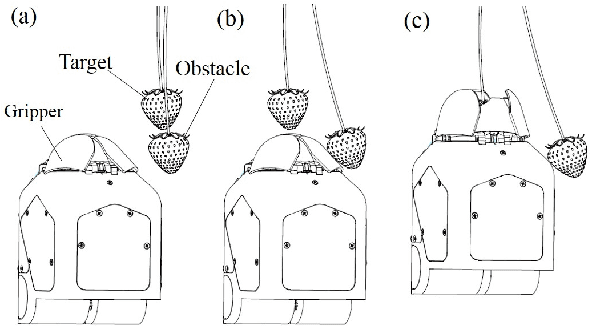
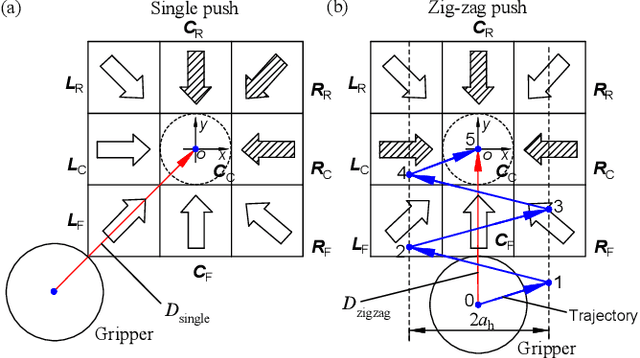
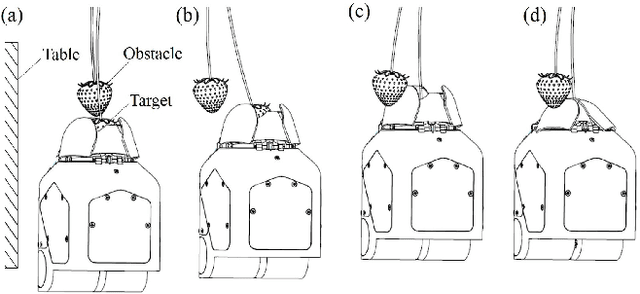
Selectively picking a target fruit surrounded by obstacles is one of the major challenges for fruit harvesting robots. Different from traditional obstacle avoidance methods, this paper presents an active obstacle separation strategy that combines push and drag motions. The separation motion and trajectory are generated based on the 3D visual perception of the obstacle information around the target. A linear push is used to clear the obstacles from the area below the target, while a zig-zag push that contains several linear motions is proposed to push aside more dense obstacles. The zig-zag push can generate multi-directional pushes and the side-to-side motion can break the static contact force between the target and obstacles, thus helping the gripper to receive a target in more complex situations. Moreover, we propose a novel drag operation to address the issue of mis-capturing obstacles located above the target, in which the gripper drags the target to a place with fewer obstacles and then pushes back to move the obstacles aside for further detachment. Furthermore, an image processing pipeline consisting of color thresholding, object detection using deep learning and point cloud operation, is developed to implement the proposed method on a harvesting robot. Field tests show that the proposed method can improve the picking performance substantially. This method helps to enable complex clusters of fruits to be harvested with a higher success rate than conventional methods.