Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProposal-free Lidar Panoptic Segmentation with Pillar-level Affinity
Paper and Code
Apr 19, 2022

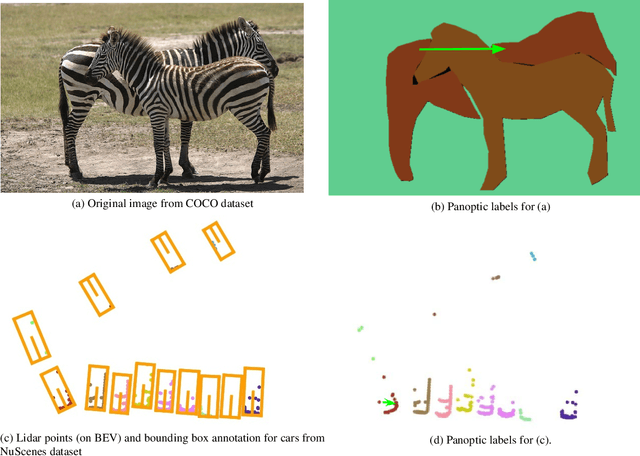
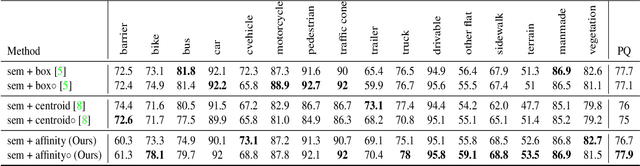
We propose a simple yet effective proposal-free architecture for lidar panoptic segmentation. We jointly optimize both semantic segmentation and class-agnostic instance classification in a single network using a pillar-based bird's-eye view representation. The instance classification head learns pairwise affinity between pillars to determine whether the pillars belong to the same instance or not. We further propose a local clustering algorithm to propagate instance ids by merging semantic segmentation and affinity predictions. Our experiments on nuScenes dataset show that our approach outperforms previous proposal-free methods and is comparable to proposal-based methods which requires extra annotation from object detection.
* CVPRW 2022 Workshop on Autonomous Driving
View paper on