 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProjected Task-Specific Layers for Multi-Task Reinforcement Learning
Paper and Code
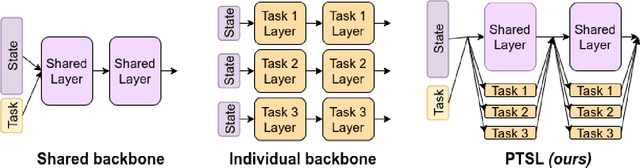
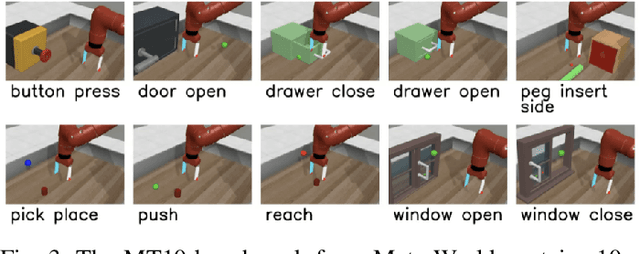
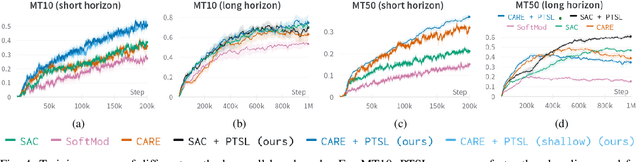
Multi-task reinforcement learning could enable robots to scale across a wide variety of manipulation tasks in homes and workplaces. However, generalizing from one task to another and mitigating negative task interference still remains a challenge. Addressing this challenge by successfully sharing information across tasks will depend on how well the structure underlying the tasks is captured. In this work, we introduce our new architecture, Projected Task-Specific Layers (PTSL), that leverages a common policy with dense task-specific corrections through task-specific layers to better express shared and variable task information. We then show that our model outperforms the state of the art on the MT10 and MT50 benchmarks of Meta-World consisting of 10 and 50 goal-conditioned tasks for a Sawyer arm.