Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeProbabilistic Evaluation of Sequential Plans from Causal Models with Hidden Variables
Paper and Code
Feb 20, 2013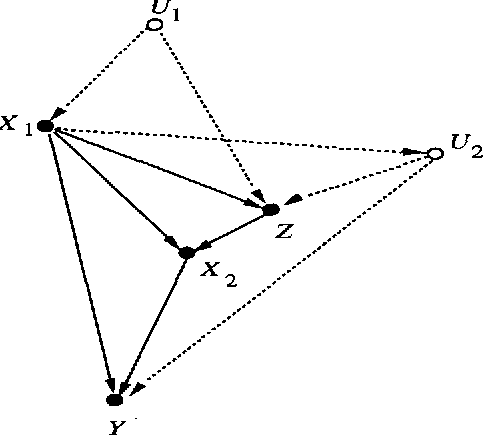
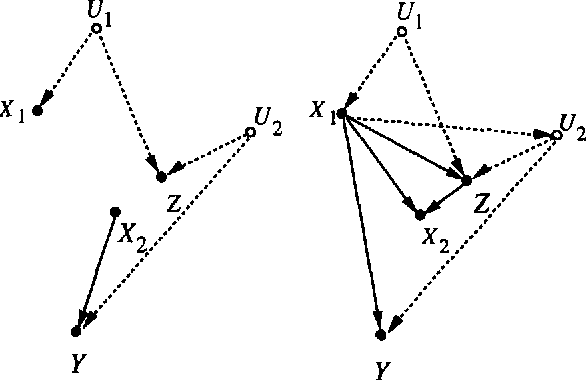
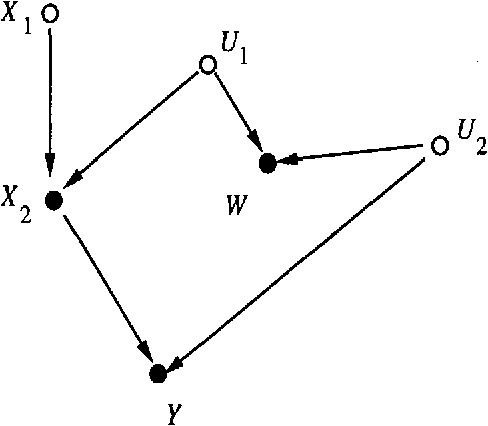
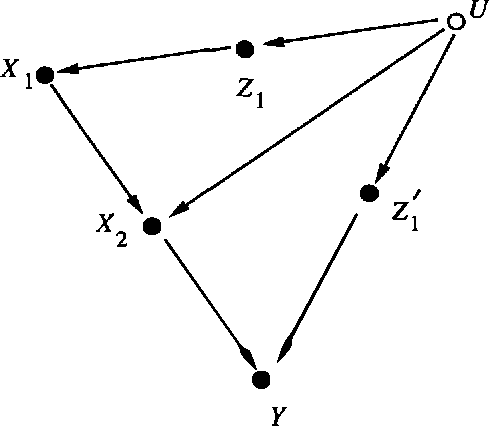
The paper concerns the probabilistic evaluation of plans in the presence of unmeasured variables, each plan consisting of several concurrent or sequential actions. We establish a graphical criterion for recognizing when the effects of a given plan can be predicted from passive observations on measured variables only. When the criterion is satisfied, a closed-form expression is provided for the probability that the plan will achieve a specified goal.
* Appears in Proceedings of the Eleventh Conference on Uncertainty in
Artificial Intelligence (UAI1995)
View paper on