 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePRNet: Self-Supervised Learning for Partial-to-Partial Registration
Paper and Code
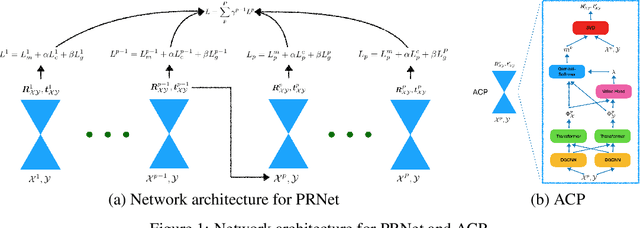
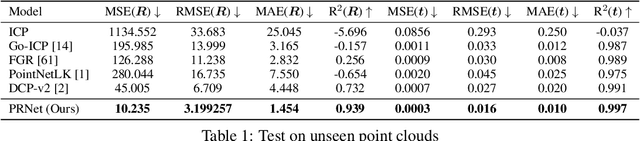
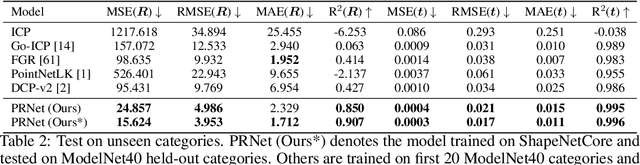

We present a simple, flexible, and general framework titled Partial Registration Network (PRNet), for partial-to-partial point cloud registration. Inspired by recently-proposed learning-based methods for registration, we use deep networks to tackle non-convexity of the alignment and partial correspondence problems. While previous learning-based methods assume the entire shape is visible, PRNet is suitable for partial-to-partial registration, outperforming PointNetLK, DCP, and non-learning methods on synthetic data. PRNet is self-supervised, jointly learning an appropriate geometric representation, a keypoint detector that finds points in common between partial views, and keypoint-to-keypoint correspondences. We show PRNet predicts keypoints and correspondences consistently across views and objects. Furthermore, the learned representation is transferable to classification.