 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredictive Runtime Monitoring for Mobile Robots using Logic-Based Bayesian Intent Inference
Paper and Code
Aug 03, 2021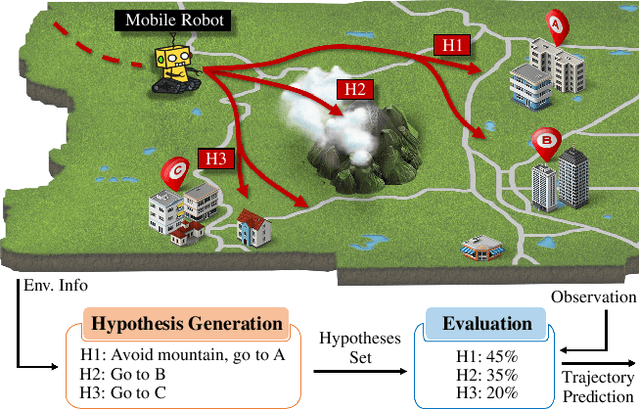
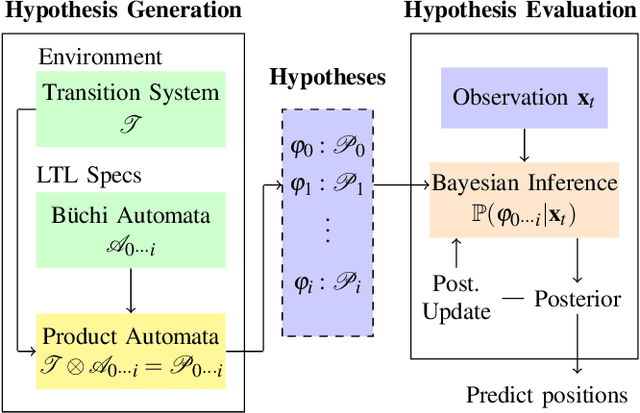
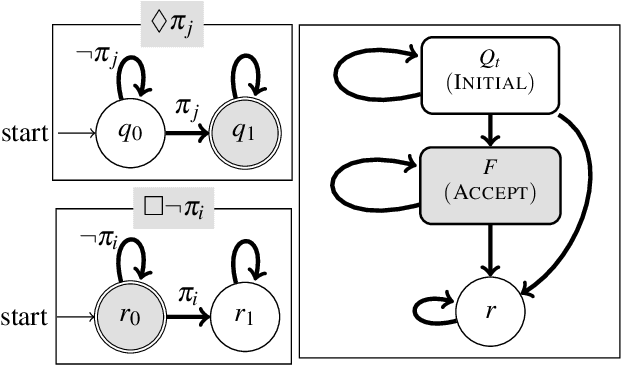
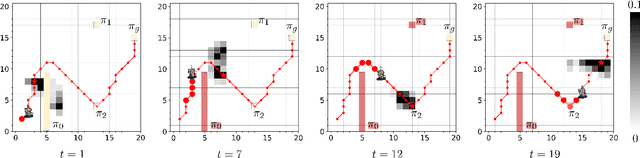
We propose a predictive runtime monitoring framework that forecasts the distribution of future positions of mobile robots in order to detect and avoid impending property violations such as collisions with obstacles or other agents. Our approach uses a restricted class of temporal logic formulas to represent the likely intentions of the agents along with a combination of temporal logic-based optimal cost path planning and Bayesian inference to compute the probability of these intents given the current trajectory of the robot. First, we construct a large but finite hypothesis space of possible intents represented as temporal logic formulas whose atomic propositions are derived from a detailed map of the robot's workspace. Next, our approach uses real-time observations of the robot's position to update a distribution over temporal logic formulae that represent its likely intent. This is performed by using a combination of optimal cost path planning and a Boltzmann noisy rationality model. In this manner, we construct a Bayesian approach to evaluating the posterior probability of various hypotheses given the observed states and actions of the robot. Finally, we predict the future position of the robot by drawing posterior predictive samples using a Monte-Carlo method. We evaluate our framework using two different trajectory datasets that contain multiple scenarios implementing various tasks. The results show that our method can predict future positions precisely and efficiently, so that the computation time for generating a prediction is a tiny fraction of the overall time horizon.