 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrediction of Muscle Activations for Reaching Movements using Deep Neural Networks
Paper and Code
Jun 13, 2017

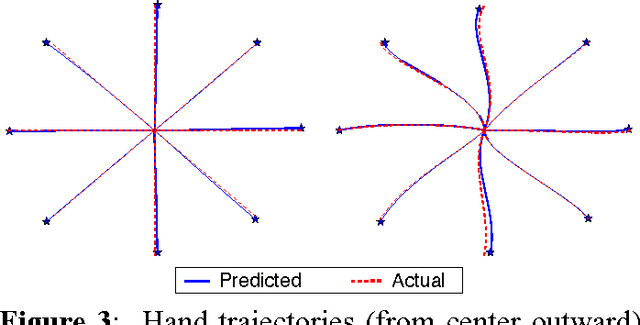
The motor control problem involves determining the time-varying muscle activation trajectories required to accomplish a given movement. Muscle redundancy makes motor control a challenging task: there are many possible activation trajectories that accomplish the same movement. Despite this redundancy, most movements are accomplished in highly stereotypical ways. For example, point-to-point reaching movements are almost universally performed with very similar smooth trajectories. Optimization methods are commonly used to predict muscle forces for measured movements. However, these approaches require computationally expensive simulations and are sensitive to the chosen optimality criteria and regularization. In this work, we investigate deep autoencoders for the prediction of muscle activation trajectories for point-to-point reaching movements. We evaluate our DNN predictions with simulated reaches and two methods to generate the muscle activations: inverse dynamics (ID) and optimal control (OC) criteria. We also investigate optimal network parameters and training criteria to improve the accuracy of the predictions.