Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePredicting Model Failure using Saliency Maps in Autonomous Driving Systems
Paper and Code
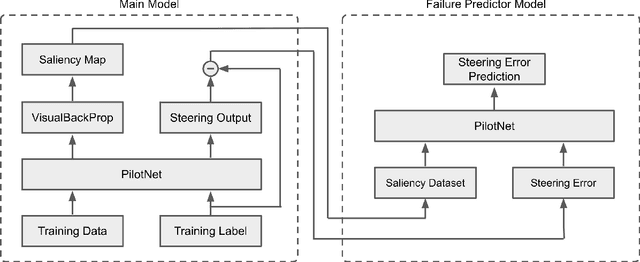
While machine learning systems show high success rate in many complex tasks, research shows they can also fail in very unexpected situations. Rise of machine learning products in safety-critical industries cause an increase in attention in evaluating model robustness and estimating failure probability in machine learning systems. In this work, we propose a design to train a student model -- a failure predictor -- to predict the main model's error for input instances based on their saliency map. We implement and review the preliminary results of our failure predictor model on an autonomous vehicle steering control system as an example of safety-critical applications.
* Presented at ICML 2019 Workshop on Uncertainty and Robustness in Deep
Learning
View paper on