Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePouring Sequence Prediction using Recurrent Neural Network
Paper and Code
May 23, 2018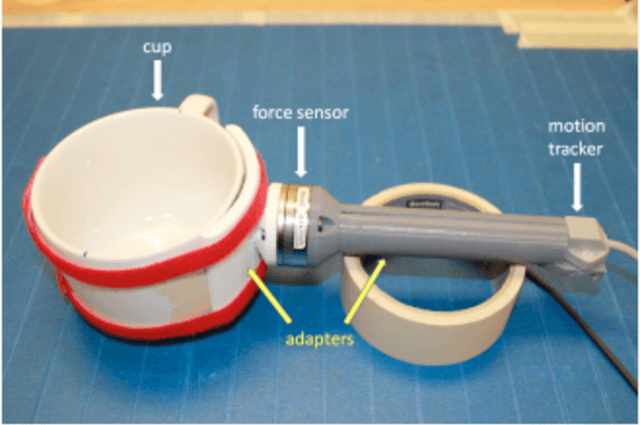
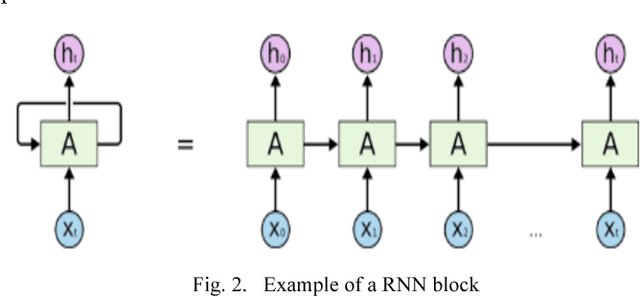
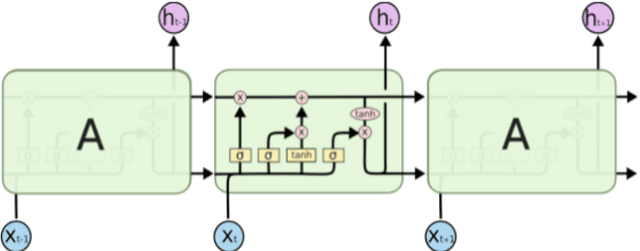
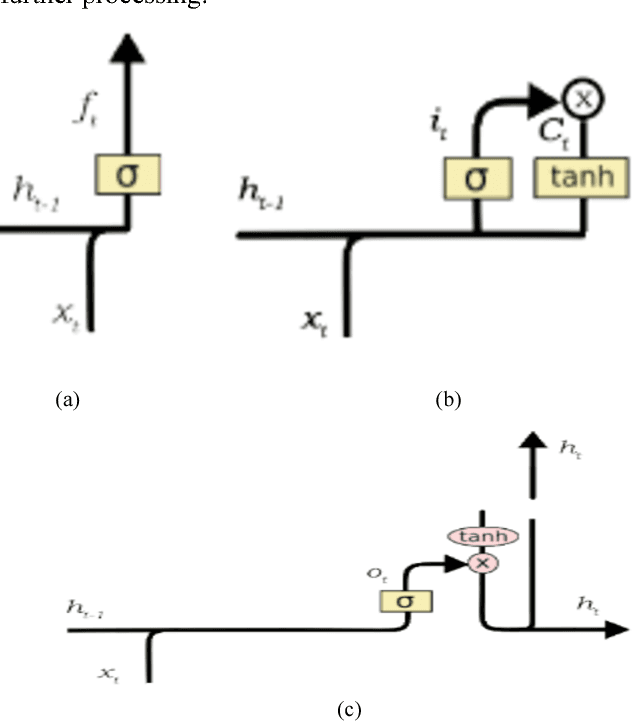
Human does their daily activity and cooking by teaching and imitating with the help of their vision and understanding of the difference between materials. Teaching a robot to do coking and daily work is difficult because of variation in environment, handling objects at different states etc. Pouring is a simple human daily life activity. In this paper, an approach to get pouring sequences were analyzed for determining the velocity of pouring and weight of the container. Then recurrent neural network (RNN) was used to build a neural network to learn that complex sequence and predict for unseen pouring sequences. Dynamic time warping (DTW) was used to evaluate the prediction performance of the trained model.
* 7 pages,7 images
View paper on