 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edgepomdp_py: A Framework to Build and Solve POMDP Problems
Paper and Code
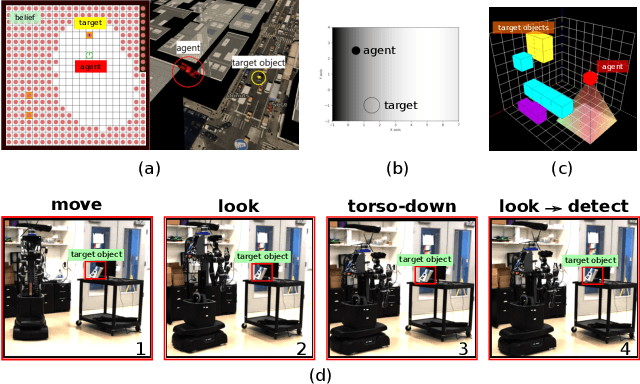
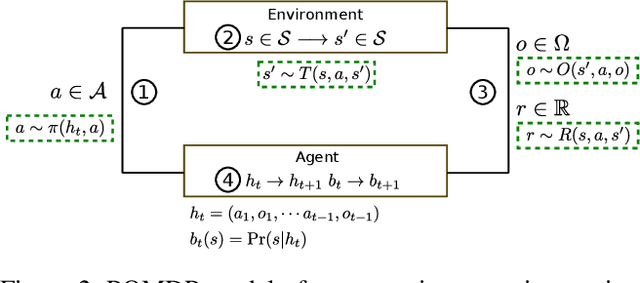
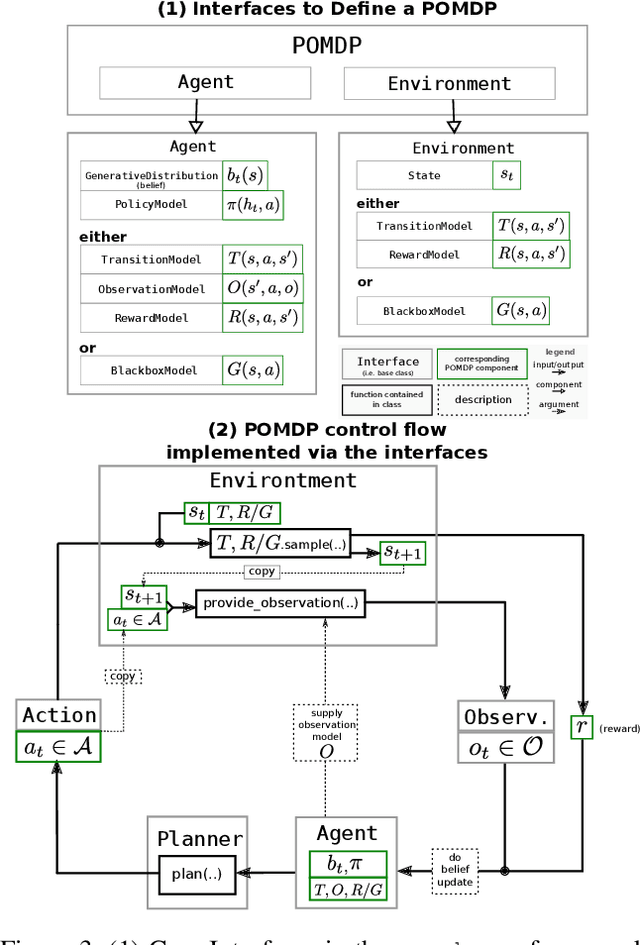
In this paper, we present pomdp_py, a general purpose Partially Observable Markov Decision Process (POMDP) library written in Python and Cython. Existing POMDP libraries often hinder accessibility and efficient prototyping due to the underlying programming language or interfaces, and require extra complexity in software toolchain to integrate with robotics systems. pomdp_py features simple and comprehensive interfaces capable of describing large discrete or continuous (PO)MDP problems. Here, we summarize the design principles and describe in detail the programming model and interfaces in pomdp_py. We also describe intuitive integration of this library with ROS (Robot Operating System), which enabled our torso-actuated robot to perform object search in 3D. Finally, we note directions to improve and extend this library for POMDP planning and beyond.