Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointPoseNet: Accurate Object Detection and 6 DoF Pose Estimation in Point Clouds
Paper and Code
Dec 19, 2019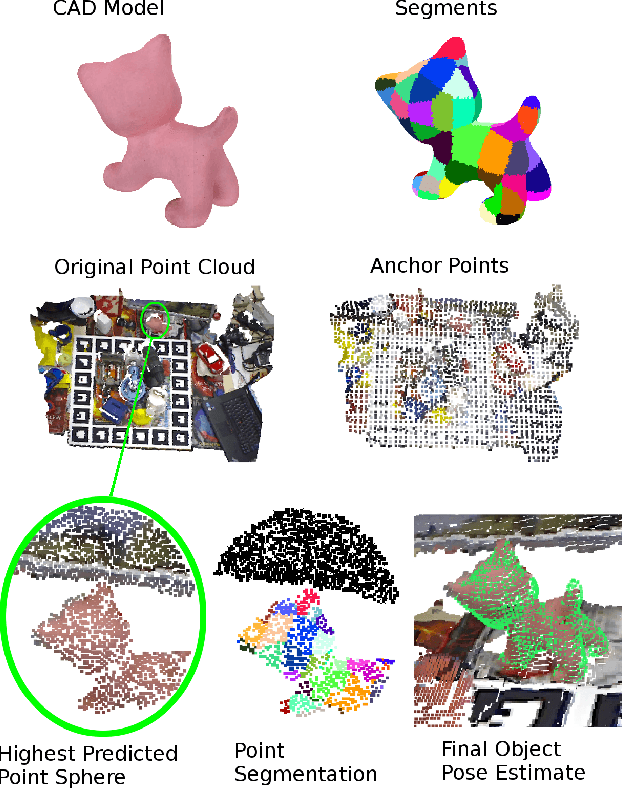
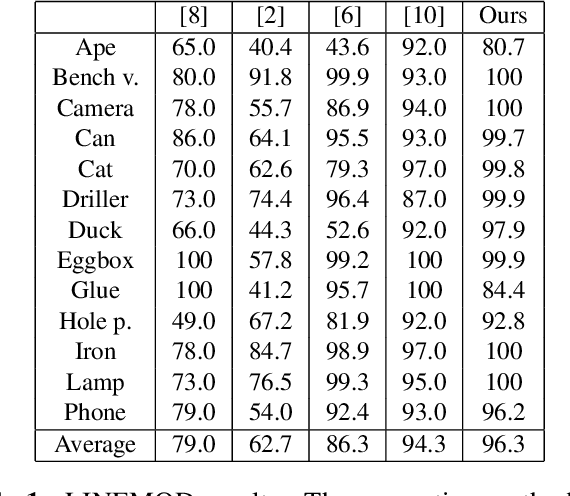
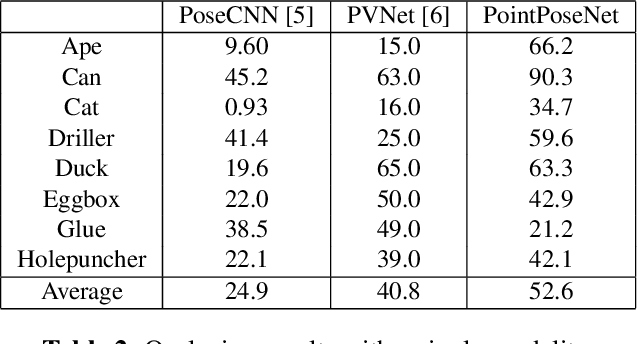
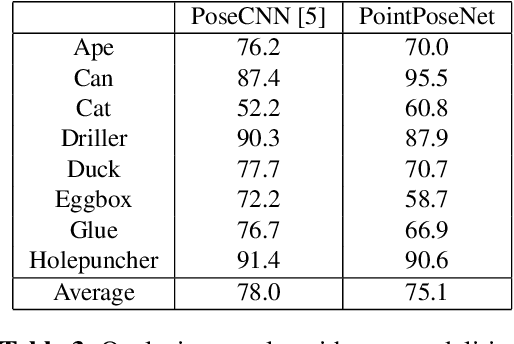
We present a learning-based method for 6 DoF pose estimation of rigid objects in point cloud data. Many recent learning-based approaches use primarily RGB information for detecting objects, in some cases with an added refinement step using depth data. Our method consumes unordered point sets with/without RGB information, from initial detection to the final transformation estimation stage. This allows us to achieve accurate pose estimates, in some cases surpassing state of the art methods trained on the same data.
* 5 pages
View paper on