 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePointNet++ Grasping: Learning An End-to-end Spatial Grasp Generation Algorithm from Sparse Point Clouds
Paper and Code
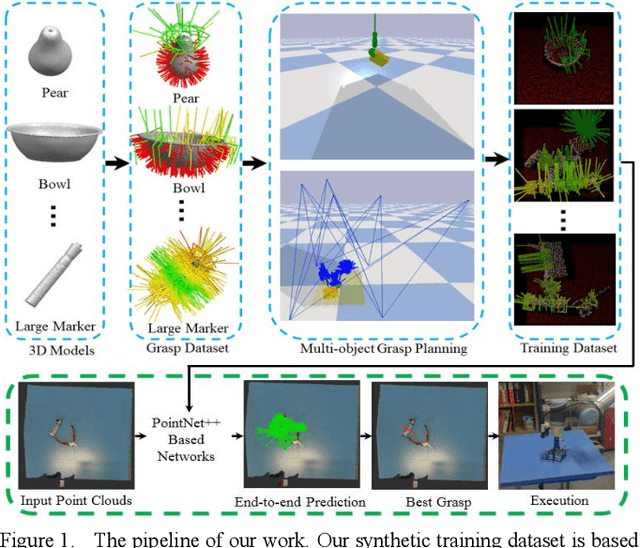
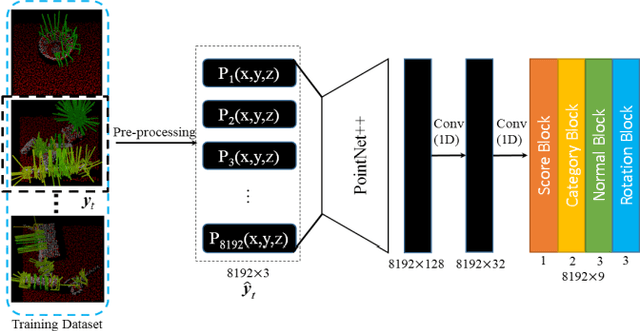
Grasping for novel objects is important for robot manipulation in unstructured environments. Most of current works require a grasp sampling process to obtain grasp candidates, combined with local feature extractor using deep learning. This pipeline is time-costly, expecially when grasp points are sparse such as at the edge of a bowl. In this paper, we propose an end-to-end approach to directly predict the poses, categories and scores (qualities) of all the grasps. It takes the whole sparse point clouds as the input and requires no sampling or search process. Moreover, to generate training data of multi-object scene, we propose a fast multi-object grasp detection algorithm based on Ferrari Canny metrics. A single-object dataset (79 objects from YCB object set, 23.7k grasps) and a multi-object dataset (20k point clouds with annotations and masks) are generated. A PointNet++ based network combined with multi-mask loss is introduced to deal with different training points. The whole weight size of our network is only about 11.6M, which takes about 102ms for a whole prediction process using a GeForce 840M GPU. Our experiment shows our work get 71.43% success rate and 91.60% completion rate, which performs better than current state-of-art works.