 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning with Submodular Objective Functions
Paper and Code
Oct 22, 2020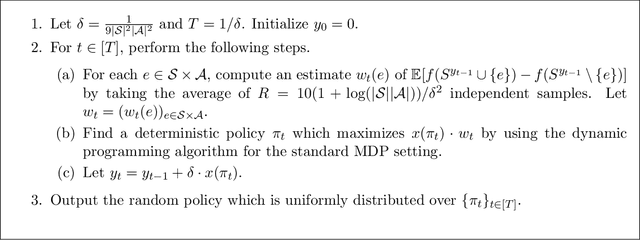
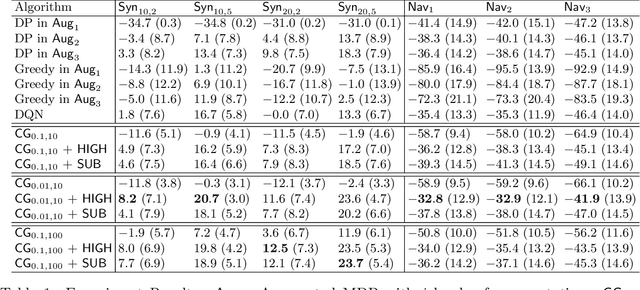
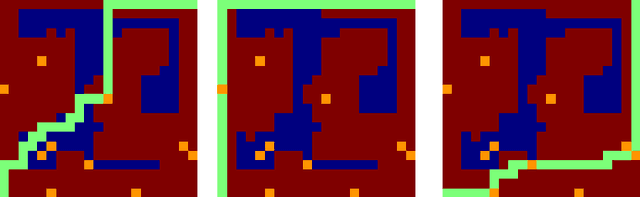
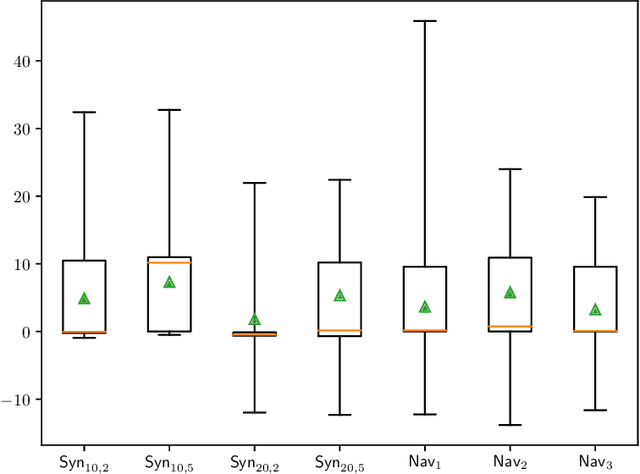
We study planning with submodular objective functions, where instead of maximizing the cumulative reward, the goal is to maximize the objective value induced by a submodular function. Our framework subsumes standard planning and submodular maximization with cardinality constraints as special cases, and thus many practical applications can be naturally formulated within our framework. Based on the notion of multilinear extension, we propose a novel and theoretically principled algorithmic framework for planning with submodular objective functions, which recovers classical algorithms when applied to the two special cases mentioned above. Empirically, our approach significantly outperforms baseline algorithms on synthetic environments and navigation tasks.