 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePlanning for Muscular and Peripersonal-Space Comfort during Human-Robot Forceful Collaboration
Paper and Code
Oct 19, 2018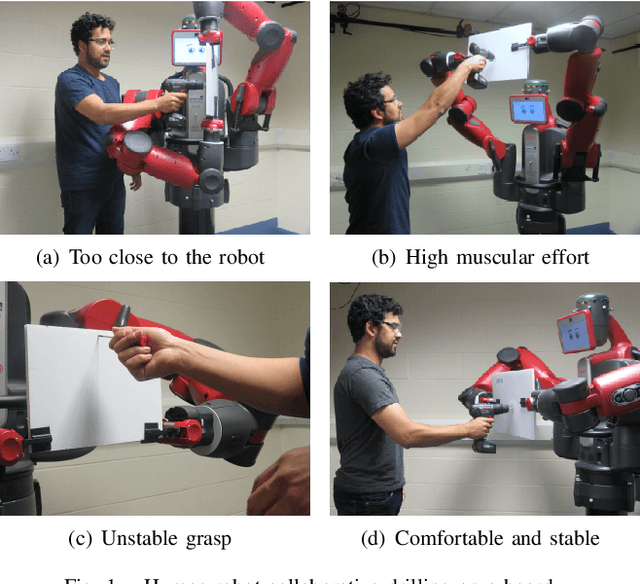
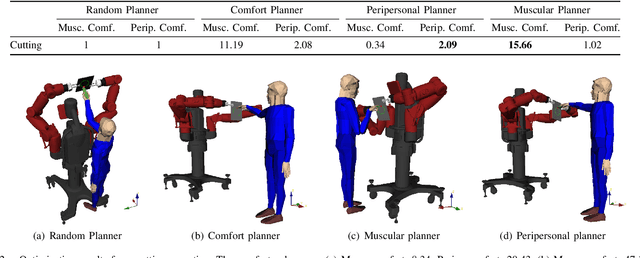
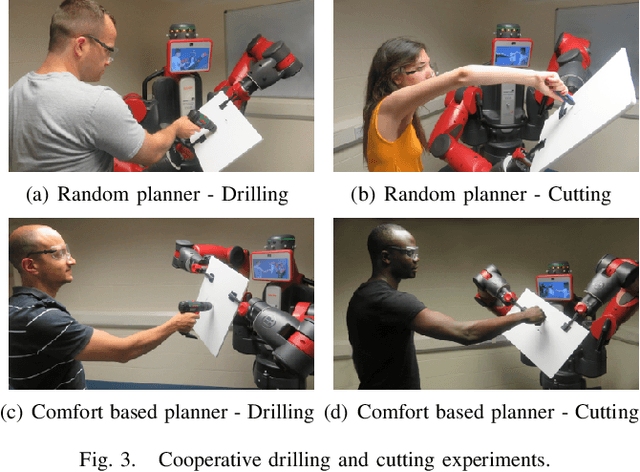
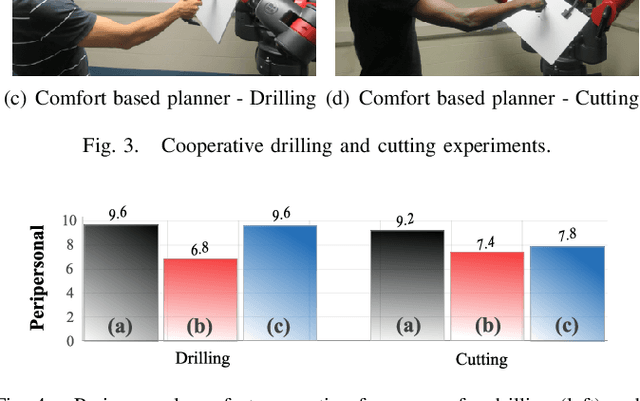
This paper presents a planning algorithm designed to improve cooperative robot behavior concerning human comfort during forceful human-robot physical interaction. Particularly, we are interested in planning for object grasping and positioning ensuring not only stability against the exerted human force but also empowering the robot with capabilities to address and improve human experience and comfort. Herein, comfort is addressed as both the muscular activation level required to exert the cooperative task, and the human spatial perception during the interaction, namely, the peripersonal space. By maximizing both comfort criteria, the robotic system can plan for the task (ensuring grasp stability) and for the human (improving human comfort). We believe this to be a key element to achieve intuitive and fluid human-robot interaction in real applications. Real HRI drilling and cutting experiments illustrated the efficiency of the proposed planner in improving overall comfort and HRI experience without compromising grasp stability.