Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePictures of Combinatorial Cubes
Paper and Code
Jul 20, 2017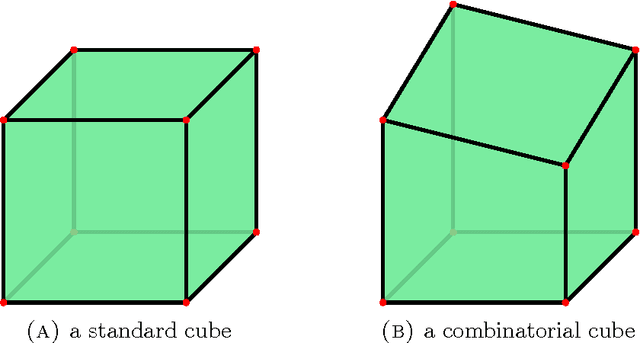
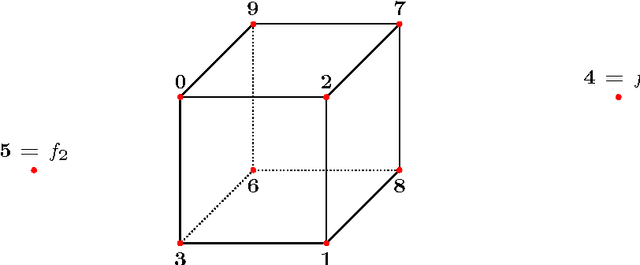
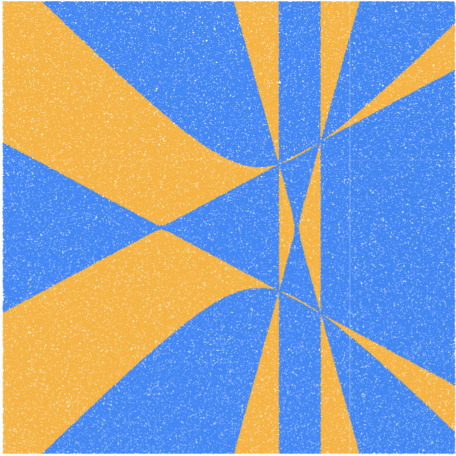
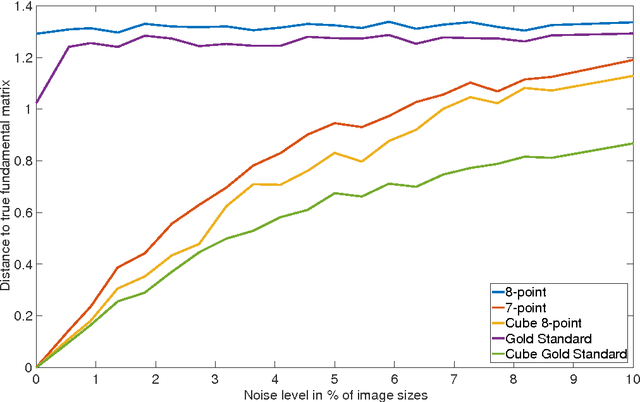
We prove that the 8-point algorithm always fails to reconstruct a unique fundamental matrix $F$ independent on the camera positions, when its input are image point configurations that are perspective projections of the vertices of a combinatorial cube in $\mathbb{R}^3$. We give an algorithm that improves the 7- and 8-point algorithm in such a pathological situation. Additionally we analyze the regions of focal point positions where a reconstruction of $F$ is possible at all, when the world points are the vertices of a combinatorial cube in $\mathbb{R}^3$.
* 12 pages
View paper on