 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePhysics-based Motion Planning: Evaluation Criteria and Benchmarking
Paper and Code
Sep 30, 2017
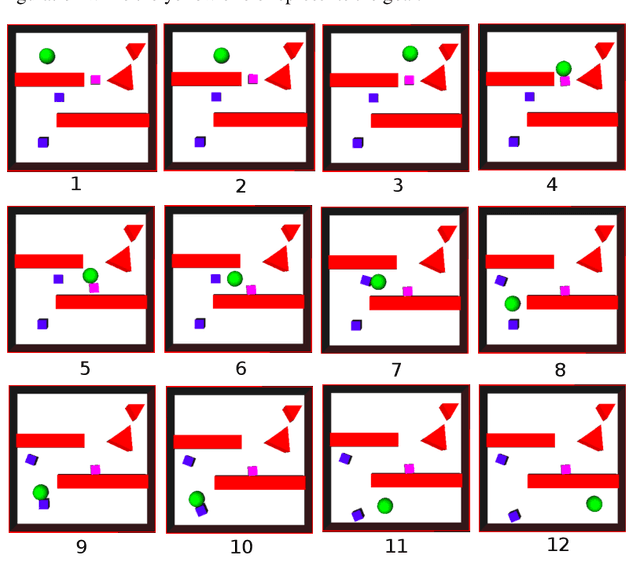
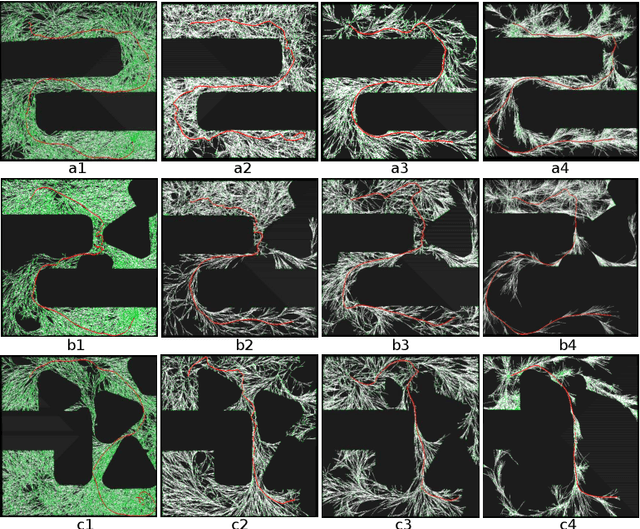
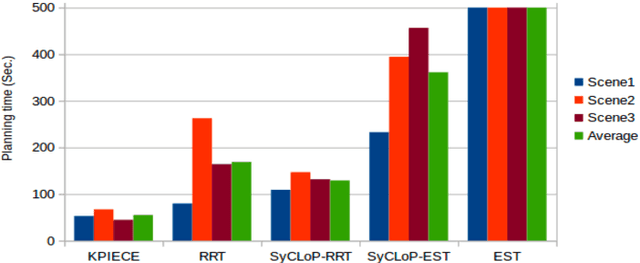
Motion planning has evolved from coping with simply geometric problems to physics-based ones that incorporate the kinodynamic and the physical constraints imposed by the robot and the physical world. Therefore, the criteria for evaluating physics-based motion planners goes beyond the computational complexity (e.g. in terms of planning time) usually used as a measure for evaluating geometrical planners, in order to consider also the quality of the solution in terms of dynamical parameters. This study proposes an evaluation criteria and analyzes the performance of several kinodynamic planners, which are at the core of physics-based motion planning, using different scenarios with fixed and manipulatable objects. RRT, EST, KPIECE and SyCLoP are used for the benchmarking. The results show that KPIECE computes the time-optimal solution with heighest success rate, whereas, SyCLoP compute the most power-optimal solution among the planners used.