 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePerformance-Aware Self-Configurable Multi-Agent Networks: A Distributed Submodular Approach for Simultaneous Coordination and Network Design
Paper and Code
Sep 02, 2024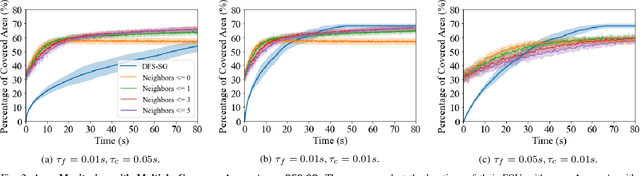
We introduce the first, to our knowledge, rigorous approach that enables multi-agent networks to self-configure their communication topology to balance the trade-off between scalability and optimality during multi-agent planning. We are motivated by the future of ubiquitous collaborative autonomy where numerous distributed agents will be coordinating via agent-to-agent communication to execute complex tasks such as traffic monitoring, event detection, and environmental exploration. But the explosion of information in such large-scale networks currently curtails their deployment due to impractical decision times induced by the computational and communication requirements of the existing near-optimal coordination algorithms. To overcome this challenge, we present the AlterNAting COordination and Network-Design Algorithm (Anaconda), a scalable algorithm that also enjoys near-optimality guarantees. Subject to the agents' bandwidth constraints, Anaconda enables the agents to optimize their local communication neighborhoods such that the action-coordination approximation performance of the network is maximized. Compared to the state of the art, Anaconda is an anytime self-configurable algorithm that quantifies its suboptimality guarantee for any type of network, from fully disconnected to fully centralized, and that, for sparse networks, is one order faster in terms of decision speed. To develop the algorithm, we quantify the suboptimality cost due to decentralization, i.e., due to communication-minimal distributed coordination. We also employ tools inspired by the literature on multi-armed bandits and submodular maximization subject to cardinality constraints. We demonstrate Anaconda in simulated scenarios of area monitoring and compare it with a state-of-the-art algorithm.