 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePenalised FTRL With Time-Varying Constraints
Paper and Code
Apr 06, 2022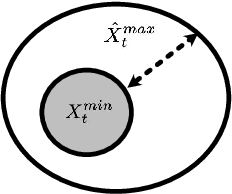

In this paper we extend the classical Follow-The-Regularized-Leader (FTRL) algorithm to encompass time-varying constraints, through adaptive penalization. We establish sufficient conditions for the proposed Penalized FTRL algorithm to achieve $O(\sqrt{t})$ regret and violation with respect to strong benchmark $\hat{X}^{max}_t$. Lacking prior knowledge of the constraints, this is probably the largest benchmark set that we can reasonably hope for. Our sufficient conditions are necessary in the sense that when they are violated there exist examples where $O(\sqrt{t})$ regret and violation is not achieved. Compared to the best existing primal-dual algorithms, Penalized FTRL substantially extends the class of problems for which $O(\sqrt{t})$ regret and violation performance is achievable.