 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePeg-in-Hole Revisited: A Generic Force Model for Haptic Assembly
Paper and Code
Nov 14, 2017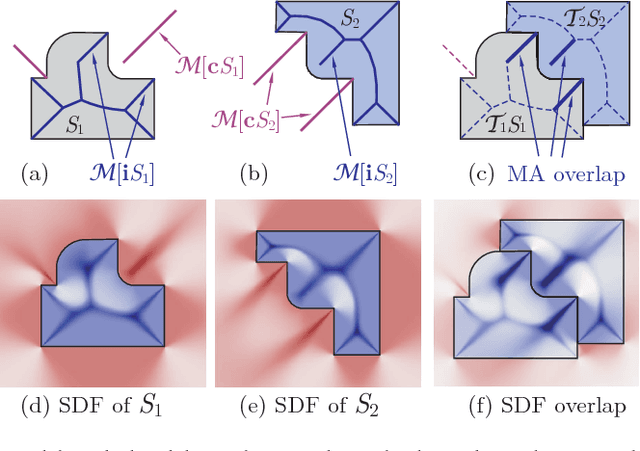



The development of a generic and effective force model for semi-automatic or manual virtual assembly with haptic support is not a trivial task, especially when the assembly constraints involve complex features of arbitrary shape. The primary challenge lies in a proper formulation of the guidance forces and torques that effectively assist the user in the exploration of the virtual environment (VE), from repulsing collisions to attracting proper contact. The secondary difficulty is that of efficient implementation that maintains the standard 1 kHz haptic refresh rate. We propose a purely geometric model for an artificial energy field that favors spatial relations leading to proper assembly, differentiated to obtain forces and torques for general motions. The energy function is expressed in terms of a cross-correlation of shape-dependent affinity fields, precomputed offline separately for each object. We test the effectiveness of the method using familiar peg-in-hole examples. We show that the proposed technique unifies the two phases of free motion and precise insertion into a single interaction mode and provides a generic model to replace the ad hoc mating constraints or virtual fixtures, with no restrictive assumption on the types of the involved assembly features.