 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePedestrian Trajectory Prediction using Context-Augmented Transformer Networks
Paper and Code
Dec 03, 2020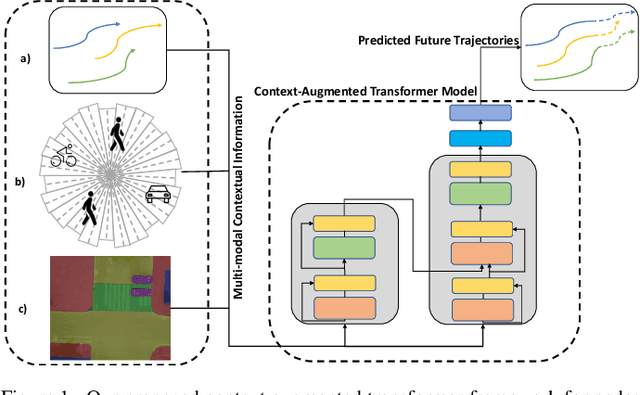
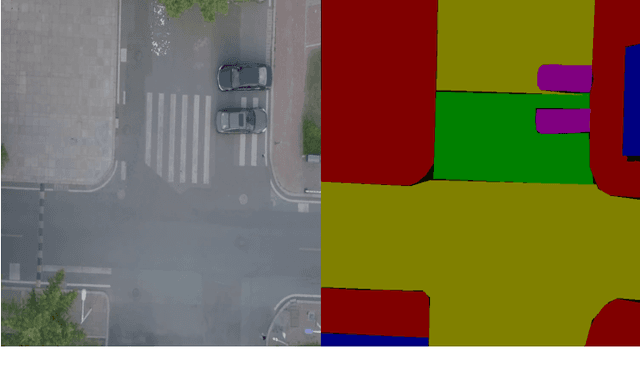
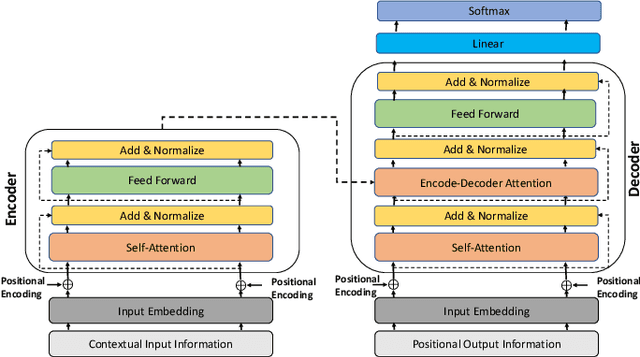

Forecasting the trajectory of pedestrians in shared urban traffic environments is still considered one of the challenging problems facing the development of autonomous vehicles (AVs). In the literature, this problem is often tackled using recurrent neural networks (RNNs). Despite the powerful capabilities of RNNs in capturing the temporal dependency in the pedestrians' motion trajectories, they were argued to be challenged when dealing with longer sequential data. Thus, in this work, we are introducing a framework based on the transformer networks that were shown recently to be more efficient and outperformed RNNs in many sequential-based tasks. We relied on a fusion of the past positional information, agent interactions information and scene physical semantics information as an input to our framework in order to provide a robust trajectory prediction of pedestrians. We have evaluated our framework on two real-life datasets of pedestrians in shared urban traffic environments and it has outperformed the compared baseline approaches in both short-term and long-term prediction horizons.