 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePay "Attention" to Adverse Weather: Weather-aware Attention-based Object Detection
Paper and Code
Apr 22, 2022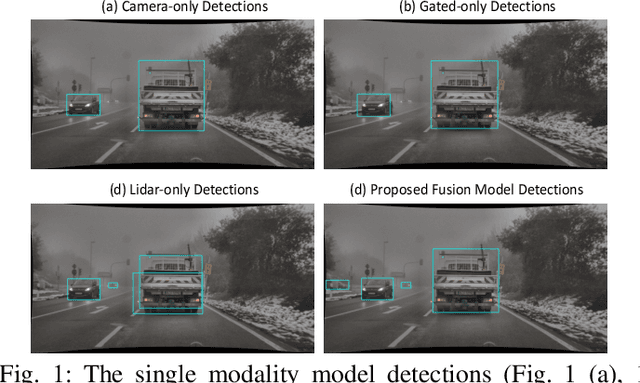
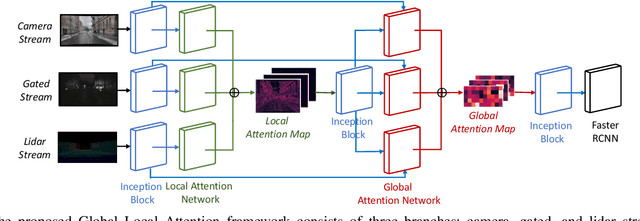
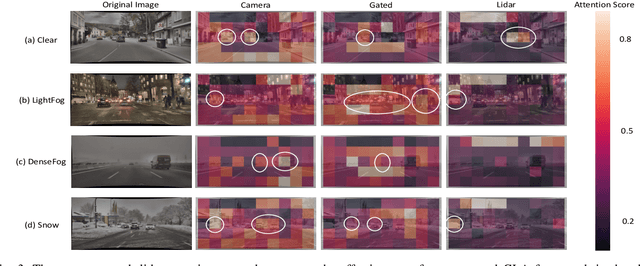

Despite the recent advances of deep neural networks, object detection for adverse weather remains challenging due to the poor perception of some sensors in adverse weather. Instead of relying on one single sensor, multimodal fusion has been one promising approach to provide redundant detection information based on multiple sensors. However, most existing multimodal fusion approaches are ineffective in adjusting the focus of different sensors under varying detection environments in dynamic adverse weather conditions. Moreover, it is critical to simultaneously observe local and global information under complex weather conditions, which has been neglected in most early or late-stage multimodal fusion works. In view of these, this paper proposes a Global-Local Attention (GLA) framework to adaptively fuse the multi-modality sensing streams, i.e., camera, gated camera, and lidar data, at two fusion stages. Specifically, GLA integrates an early-stage fusion via a local attention network and a late-stage fusion via a global attention network to deal with both local and global information, which automatically allocates higher weights to the modality with better detection features at the late-stage fusion to cope with the specific weather condition adaptively. Experimental results demonstrate the superior performance of the proposed GLA compared with state-of-the-art fusion approaches under various adverse weather conditions, such as light fog, dense fog, and snow.