 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning Using Probability Tensor Flows
Paper and Code
Mar 05, 2020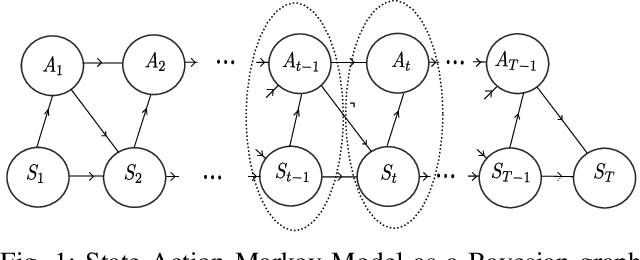

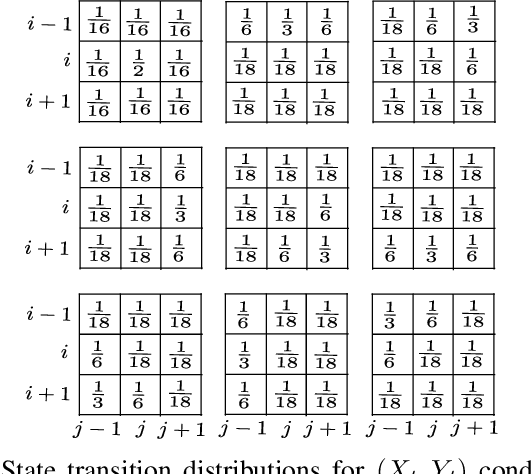
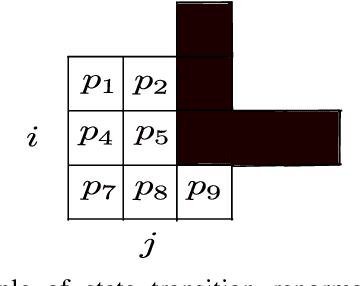
Probability models have been proposed in the literature to account for "intelligent" behavior in many contexts. In this paper, probability propagation is applied to model agent's motion in potentially complex scenarios that include goals and obstacles. The backward flow provides precious background information to the agent's behavior, viz., inferences coming from the future determine the agent's actions. Probability tensors are layered in time in both directions in a manner similar to convolutional neural networks. The discussion is carried out with reference to a set of simulated grids where, despite the apparent task complexity, a solution, if feasible, is always found. The original model proposed by Attias has been extended to include non-absorbing obstacles, multiple goals and multiple agents. The emerging behaviors are very realistic and demonstrate great potentials of the application of this framework to real environments.