Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath-following based Point Matching using Similarity Transformation
Paper and Code
Jan 04, 2017

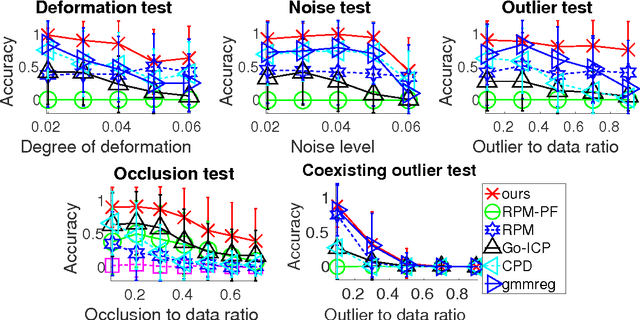
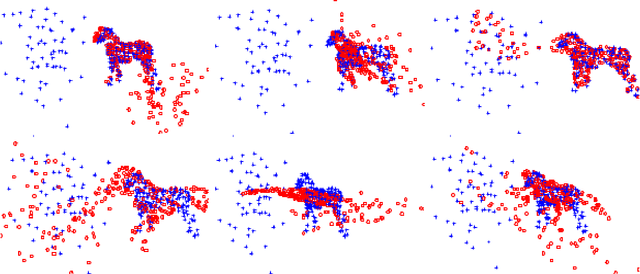
To address the problem of 3D point matching where the poses of two point sets are unknown, we adapt a recently proposed path following based method to use similarity transformation instead of the original affine transformation. The reduced number of transformation parameters leads to more constrained and desirable matching results. Experimental results demonstrate better robustness of the proposed method over state-of-the-art methods.
View paper on