 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeParticle Traces for Detecting Divergent Robot Behavior
Paper and Code
Aug 04, 2016

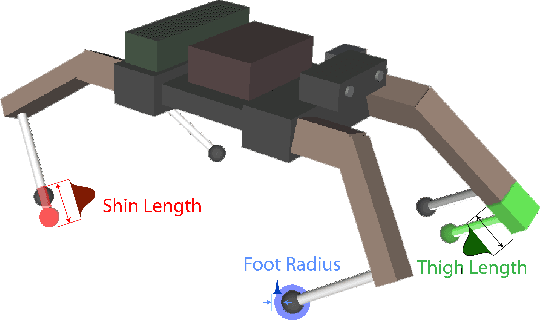

The motion of robots and objects in our world is often highly dependent upon contact. When contact is expected but does not occur or when contact is not expected but does occur, robot behavior diverges from plan, often disastrously. This paper describes an approach that uses simulation to detect possible such behavioral divergences on real robots. This approach, and others like it, could be applied to validation of robot behaviors, mechanism design, and even online planning. The particle trace approach samples robot modeling parameters, sensory readings, and state estimates to evaluate a robot's behavior statistically over a range of conditions. We demonstrate that combining even coarse estimates of state and modeling parameters with fast multibody simulation can be sufficient to detect divergent robot behavior and characterize robot performance in the real world. Correspondingly, this approach could be used to assess risk and find and analyze likely failures, given the extensive data that such simulations can generate. We assess this approach on actuated, high degree-of-freedom robot locomotion examples, a picking task with a fixed-base manipulator, and an unpowered passive dynamic walker. This research works toward understanding how multi-rigid body simulations can better characterize the behavior of robots without significantly compliant elements.