 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeP1AC: Revisiting Absolute Pose From a Single Affine Correspondence
Paper and Code
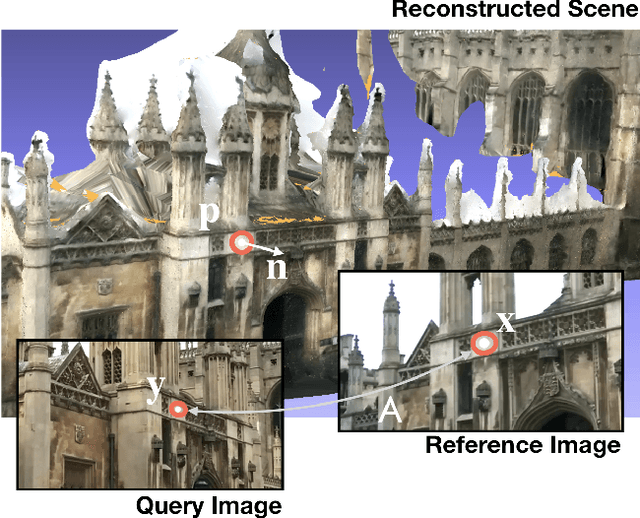

We introduce a novel solution to the problem of estimating the pose of a calibrated camera given a single observation of an oriented point and an affine correspondence to a reference image. Affine correspondences have traditionally been used to improve feature matching over wide baselines; however, little previous work has considered the use of such correspondences for absolute camera pose computation. The advantage of our approach (P1AC) is that it requires only a single correspondence in the minimal case in comparison to the traditional point-based approach (P3P) which requires at least three points. Our method removes the limiting assumptions made in previous work and provides a general solution that is applicable to large-scale image-based localization. Our evaluation on synthetic data shows that our approach is numerically stable and more robust to point observation noise than P3P. We also evaluate the application of our approach for large-scale image-based localization and demonstrate a practical reduction in the number of iterations and computation time required to robustly localize an image.