 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOS2D: One-Stage One-Shot Object Detection by Matching Anchor Features
Paper and Code
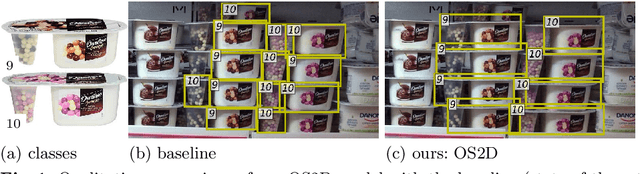
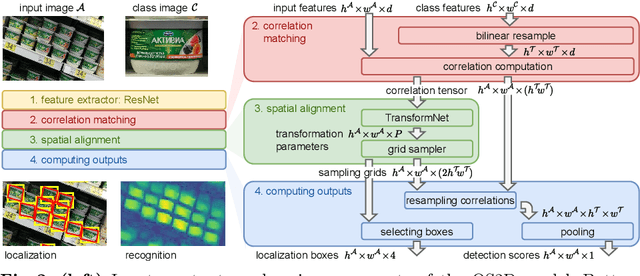
In this paper, we consider the task of one-shot object detection, which consists in detecting objects defined by a single demonstration. Differently from the standard object detection, the classes of objects used for training and testing do not overlap. We build the one-stage system that performs localization and recognition jointly. We use dense correlation matching of learned local features to find correspondences, a feed-forward geometric transformation model to align features and bilinear resampling of the correlation tensor to compute the detection score of the aligned features. All the components are differentiable, which allows end-to-end training. Experimental evaluation on several challenging domains (retail products, 3D objects, buildings and logos) shows that our method can detect unseen classes (e.g., toothpaste when trained on groceries) and outperforms several baselines by a significant margin. Our code is available online: https://github.com/aosokin/os2d .