 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrientation-Constrained System for Lamp Detection in Buildings Based on Computer Vision
Paper and Code
Dec 18, 2023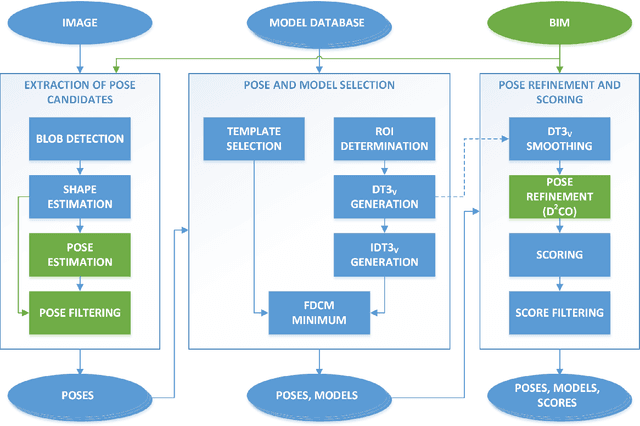
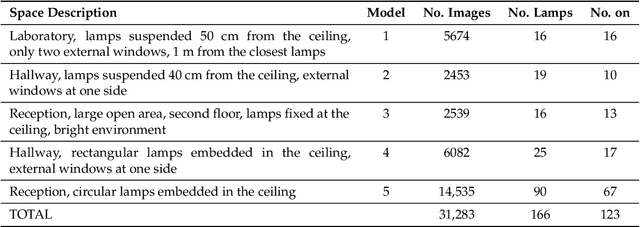

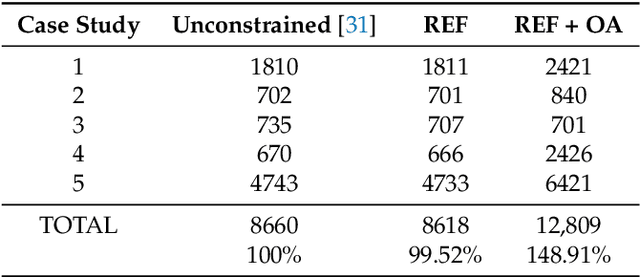
Computer vision is used in this work to detect lighting elements in buildings with the goal of improving the accuracy of previous methods to provide a precise inventory of the location and state of lamps. Using the framework developed in our previous works, we introduce two new modifications to enhance the system: first, a constraint on the orientation of the detected poses in the optimization methods for both the initial and the refined estimates based on the geometric information of the building information modelling (BIM) model; second, an additional reprojection error filtering step to discard the erroneous poses introduced with the orientation restrictions, keeping the identification and localization errors low while greatly increasing the number of detections. These~enhancements are tested in five different case studies with more than 30,000 images, with results showing improvements in the number of detections, the percentage of correct model and state identifications, and the distance between detections and reference positions