 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeORACLE: Occlusion-Resilient And self-Calibrating mmWave Radar Network for People Tracking
Paper and Code
Aug 30, 2022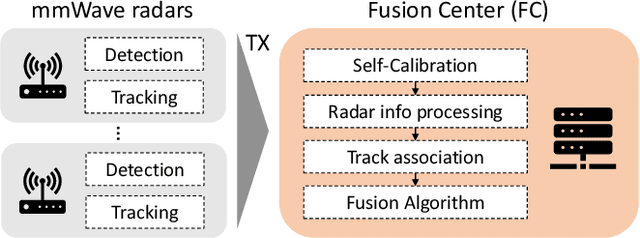
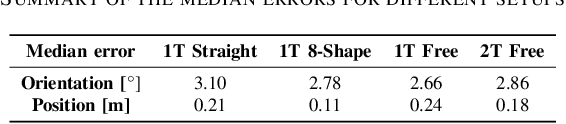
Millimeter wave (mmWave) radars are emerging as valid alternatives to cameras for the pervasive contactless monitoring of industrial environments, enabling very tight human-machine interactions. However, commercial mmWave radars feature a limited range (up to 6-8 m) and are subject to occlusion, which may constitute a significant drawback in large industrial settings containing machinery and obstacles. Thus, covering large indoor spaces requires multiple radars with known relative position and orientation. As a result, we necessitate algorithms to combine their outputs. In this work, we present ORACLE, an autonomous system that (i) integrates automatic relative position and orientation estimation from multiple radar devices by exploiting the trajectories of people moving freely in the radars' common fields of view and (ii) fuses the tracking information from multiple radars to obtain a unified tracking among all sensors. Our implementation and experimental evaluation of ORACLE results in median errors of 0.18 m and 2.86{\deg} for radars location and orientation estimates, respectively. The fused tracking improves upon single sensor tracking by 6%, in terms of mean tracking accuracy, while reaching a mean tracking error as low as 0.14 m. Finally, ORACLE is robust to fusion relative time synchronization mismatches between -20% and +50%.