 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing SLAM Evaluation Footprint Through Dynamic Range Coverage Analysis of Datasets
Paper and Code
Sep 13, 2022
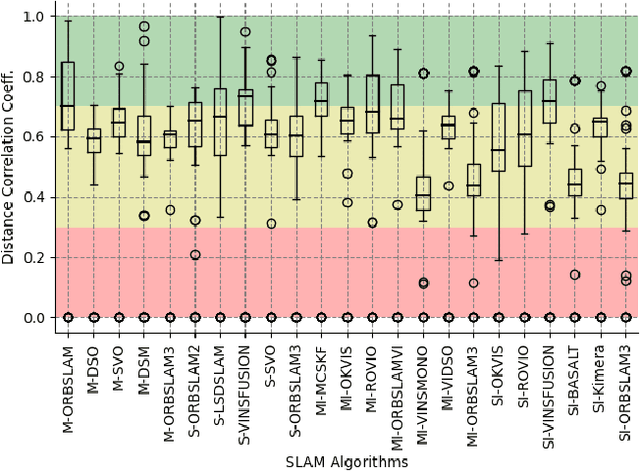
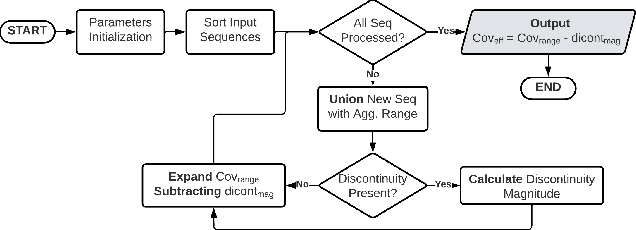
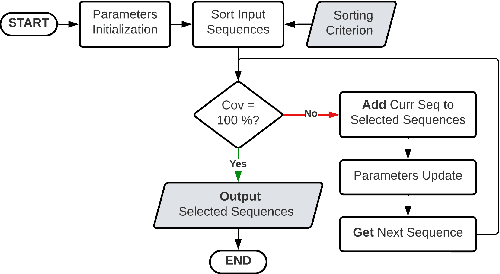
Simultaneous Localization and Mapping (SLAM) is considered an ever-evolving problem due to its usage in many applications. Evaluation of SLAM is done typically using publicly available datasets which are increasing in number and the level of difficulty. Each dataset provides a certain level of dynamic range coverage that is a key aspect of measuring the robustness and resilience of SLAM. In this paper, we provide a systematic analysis of the dynamic range coverage of datasets based on a number of characterization metrics, and our analysis shows a huge level of redundancy within and between datasets. Subsequently, we propose a dynamic programming (DP) algorithm for eliminating the redundancy in the evaluation process of SLAM by selecting a subset of sequences that matches a single or multiple dynamic range coverage objectives. It is shown that, with the help of dataset characterization and DP selection algorithm, a reduction in the evaluation effort can be achieved while maintaining the same level of coverage. Finally, we show that, in a multi-objective SLAM setup, the aggregation of multiple runs of the algorithm can achieve the same conclusions in localization accuracy by a SLAM algorithms.