 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Gated Deep Learning Architectures for Sensor Fusion
Paper and Code
Oct 08, 2018

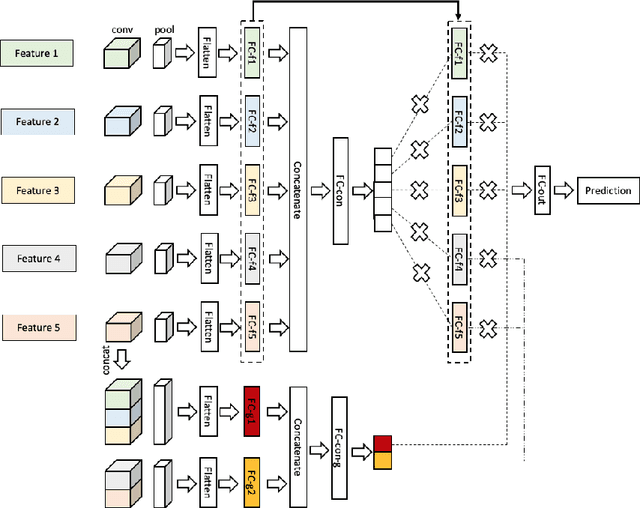
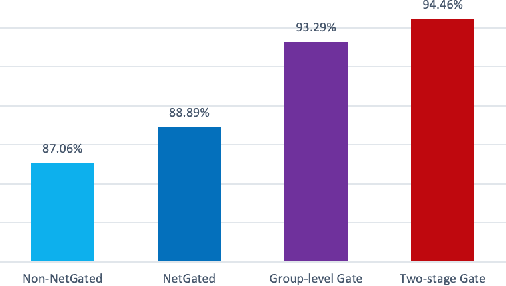
Sensor fusion is a key technology that integrates various sensory inputs to allow for robust decision making in many applications such as autonomous driving and robot control. Deep neural networks have been adopted for sensor fusion in a body of recent studies. Among these, the so-called netgated architecture was proposed, which has demonstrated improved performances over the conventional convolutional neural networks (CNN). In this paper, we address several limitations of the baseline negated architecture by proposing two further optimized architectures: a coarser-grained gated architecture employing (feature) group-level fusion weights and a two-stage gated architectures leveraging both the group-level and feature level fusion weights. Using driving mode prediction and human activity recognition datasets, we demonstrate the significant performance improvements brought by the proposed gated architectures and also their robustness in the presence of sensor noise and failures.