 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimization Based Motion Planning for Multi-Limbed Vertical Climbing Robots
Paper and Code
Sep 13, 2019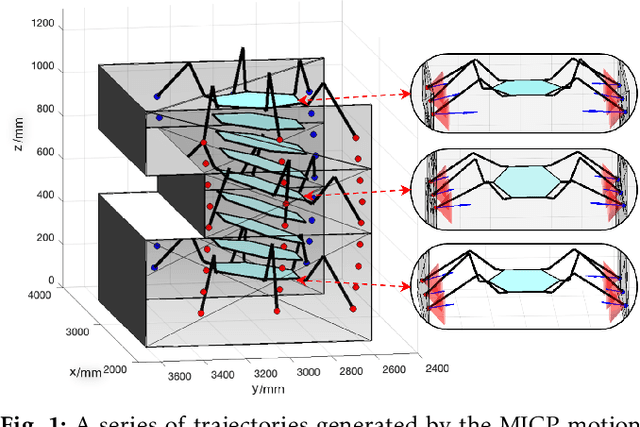
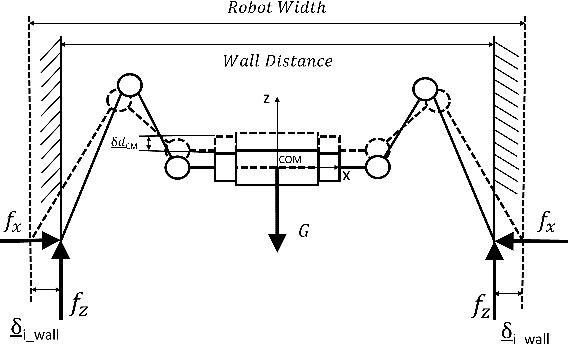
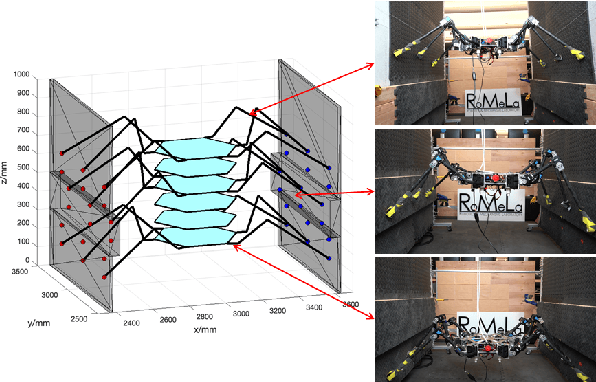
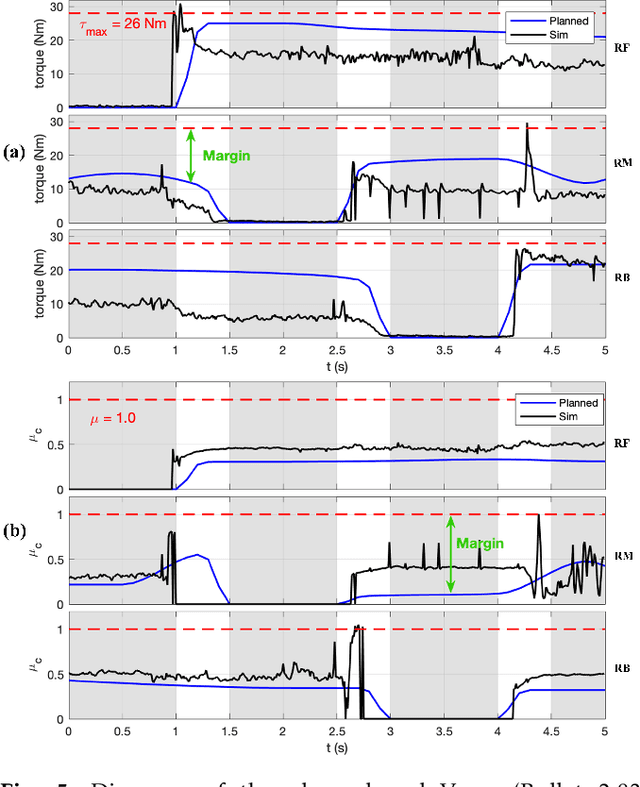
Motion planning trajectories for a multi-limbed robot to climb up walls requires a unique combination of constraints on torque, contact force, and posture. This paper focuses on motion planning for one particular setup wherein a six-legged robot braces itself between two vertical walls and climbs vertically with end effectors that only use friction. Instead of motion planning with a single nonlinear programming (NLP) solver, we decoupled the problem into two parts with distinct physical meaning: torso postures and contact forces. The first part can be formulated as either a mixed-integer convex programming (MICP) or NLP problem, while the second part is formulated as a series of standard convex optimization problems. Variants of the two wall climbing problem e.g., obstacle avoidance, uneven surfaces, and angled walls, help verify the proposed method in simulation and experimentation.