Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimal Actuator Attacks on Autonomous Vehicles Using Reinforcement Learning
Paper and Code
Feb 11, 2025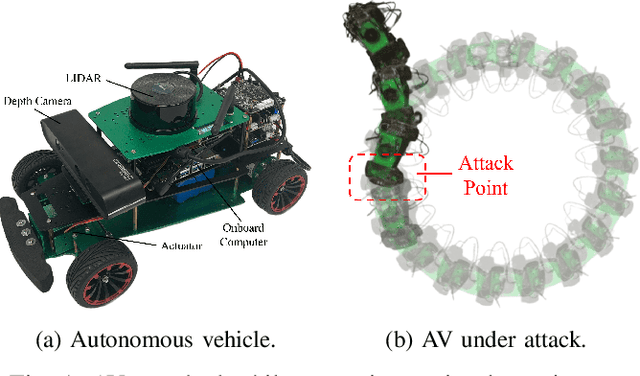
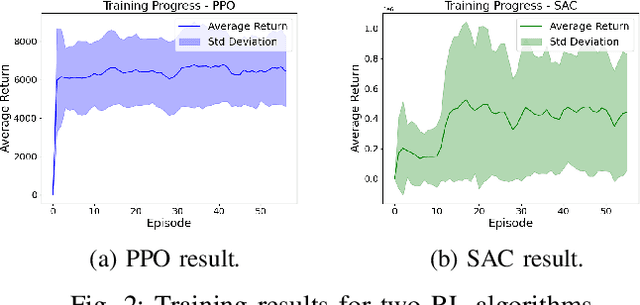
With the increasing prevalence of autonomous vehicles (AVs), their vulnerability to various types of attacks has grown, presenting significant security challenges. In this paper, we propose a reinforcement learning (RL)-based approach for designing optimal stealthy integrity attacks on AV actuators. We also analyze the limitations of state-of-the-art RL-based secure controllers developed to counter such attacks. Through extensive simulation experiments, we demonstrate the effectiveness and efficiency of our proposed method.
* Accepted in 2024 IEEE/RSJ International Conference on Intelligent
Robots and Systems (IROS) Workshop
View paper on