Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpenCL-based FPGA accelerator for disparity map generation with stereoscopic event cameras
Paper and Code
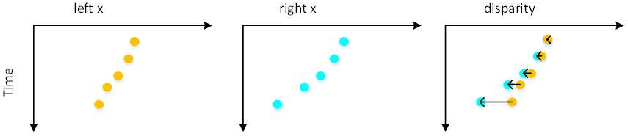
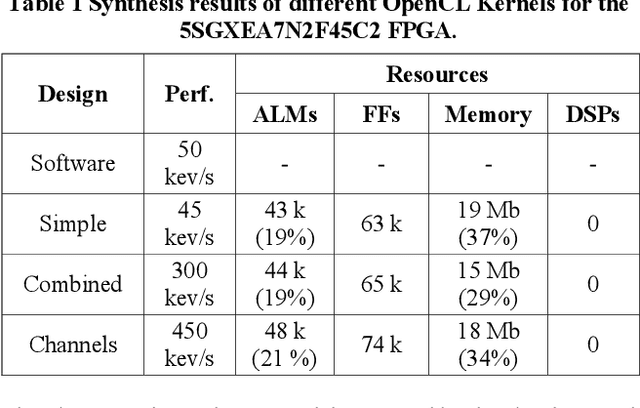

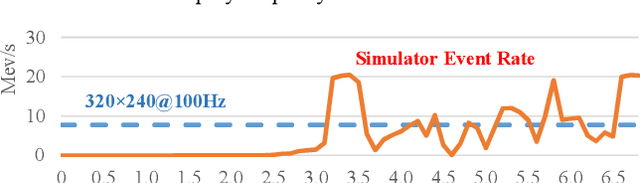
Although event-based cameras are already commercially available. Vision algorithms based on them are still not common. As a consequence, there are few Hardware Accelerators for them. In this work we present some experiments to create FPGA accelerators for a well-known vision algorithm using event-based cameras. We present a stereo matching algorithm to create a stream of disparity events disparity map and implement several accelerators using the Intel FPGA OpenCL tool-chain. The results show that multiple designs can be easily tested and that a performance speedup of more than 8x can be achieved with simple code transformations.
* Presented at HIP3ES, 2019
View paper on