 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOpen-RadVLAD: Fast and Robust Radar Place Recognition
Paper and Code

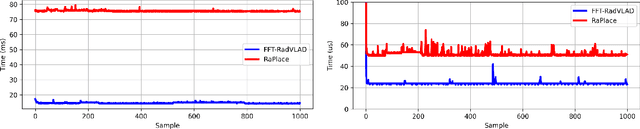


Radar place recognition often involves encoding a live scan as a vector and matching this vector to a database in order to recognise that the vehicle is in a location that it has visited before. Radar is inherently robust to lighting or weather conditions, but place recognition with this sensor is still affected by: (1) viewpoint variation, i.e. translation and rotation, (2) sensor artefacts or "noises". For 360-degree scanning radar, rotation is readily dealt with by in some way aggregating across azimuths. Also, we argue in this work that it is more critical to deal with the richness of representation and sensor noises than it is to deal with translational invariance - particularly in urban driving where vehicles predominantly follow the same lane when repeating a route. In our method, for computational efficiency, we use only the polar representation. For partial translation invariance and robustness to signal noise, we use only a one-dimensional Fourier Transform along radial returns. We also achieve rotational invariance and a very discriminative descriptor space by building a vector of locally aggregated descriptors. Our method is more comprehensively tested than all prior radar place recognition work - over an exhaustive combination of all 870 pairs of trajectories from 30 Oxford Radar RobotCar Dataset sequences (each approximately 10 km). Code and detailed results are provided at github.com/mttgdd/open-radvlad, as an open implementation and benchmark for future work in this area. We achieve a median of 91.52% in Recall@1, outstripping the 69.55% for the only other open implementation, RaPlace, and at a fraction of its computational cost (relying on fewer integral transforms e.g. Radon, Fourier, and inverse Fourier).