 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne-shot Visual Imitation via Attributed Waypoints and Demonstration Augmentation
Paper and Code
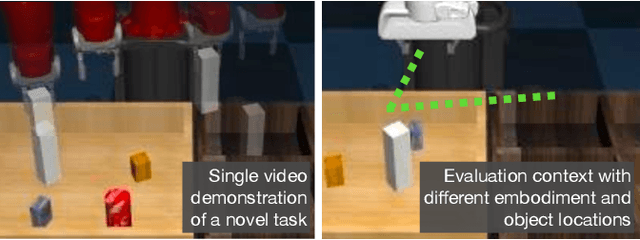
In this paper, we analyze the behavior of existing techniques and design new solutions for the problem of one-shot visual imitation. In this setting, an agent must solve a novel instance of a novel task given just a single visual demonstration. Our analysis reveals that current methods fall short because of three errors: the DAgger problem arising from purely offline training, last centimeter errors in interacting with objects, and mis-fitting to the task context rather than to the actual task. This motivates the design of our modular approach where we a) separate out task inference (what to do) from task execution (how to do it), and b) develop data augmentation and generation techniques to mitigate mis-fitting. The former allows us to leverage hand-crafted motor primitives for task execution which side-steps the DAgger problem and last centimeter errors, while the latter gets the model to focus on the task rather than the task context. Our model gets 100% and 48% success rates on two recent benchmarks, improving upon the current state-of-the-art by absolute 90% and 20% respectively.