 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOne Object at a Time: Accurate and Robust Structure From Motion for Robots
Paper and Code
Jul 31, 2022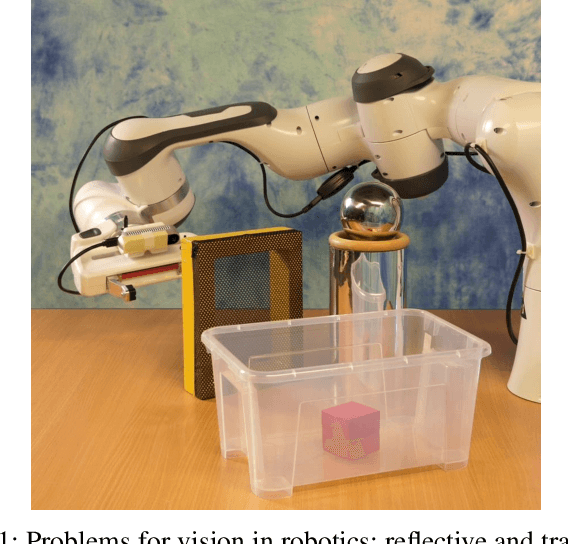



A gaze-fixating robot perceives distance to the fixated object and relative positions of surrounding objects immediately, accurately, and robustly. We show how fixation, which is the act of looking at one object while moving, exploits regularities in the geometry of 3D space to obtain this information. These regularities introduce rotation-translation couplings that are not commonly used in structure from motion. To validate, we use a Franka Emika Robot with an RGB camera. We a) find that error in distance estimate is less than 5 mm at a distance of 15 cm, and b) show how relative position can be used to find obstacles under challenging scenarios. We combine accurate distance estimates and obstacle information into a reactive robot behavior that is able to pick up objects of unknown size, while impeded by unforeseen obstacles.