 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Robot Assisted Movement in Wireless Mobile Sensor Networks
Paper and Code
Jul 07, 2021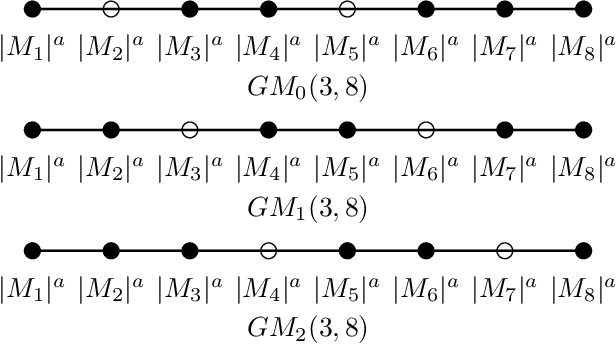
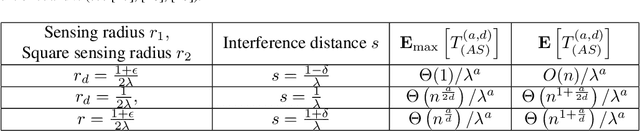

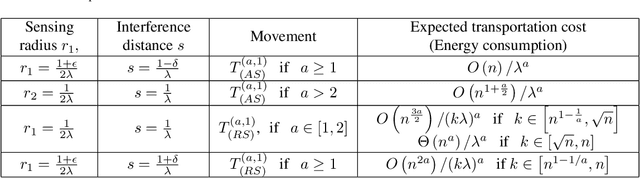
This paper deals with random sensors initially randomly deployed on the line according to general random process and on the plane according to two independent general random processes. The mobile robot with carrying capacity $k$ placed at the origin point is to move the sensors to achieve the general scheduling requirement such as coverage, connectivity and thus to satisfy the desired communication property in the network. We study tradeoffs between the energy consumption in robot's movement, the numbers of sensors $n$, the sensor range $r$, the interference distance $s$, and the robot capacity $k$ until completion of the coverage simultaneously with interference scheduling task. In this work, we obtain upper bounds for the energy consumption in robot's movement and obtain the sharp decrease in the total movement cost of the robot so as to provide the coverage simultaneously with interference requirement.