 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the relationship between Koopman operator approximations and neural ordinary differential equations for data-driven time-evolution predictions
Paper and Code
Nov 20, 2024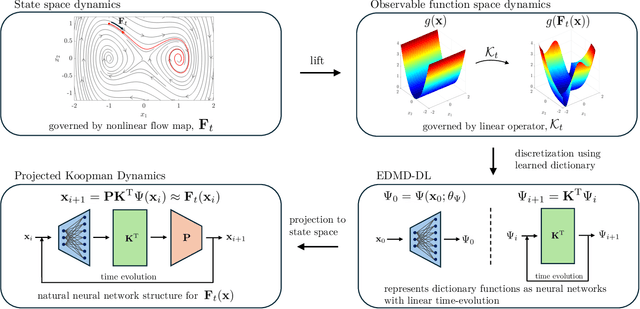



This work explores the relationship between state space methods and Koopman operator-based methods for predicting the time-evolution of nonlinear dynamical systems. We demonstrate that extended dynamic mode decomposition with dictionary learning (EDMD-DL), when combined with a state space projection, is equivalent to a neural network representation of the nonlinear discrete-time flow map on the state space. We highlight how this projection step introduces nonlinearity into the evolution equations, enabling significantly improved EDMD-DL predictions. With this projection, EDMD-DL leads to a nonlinear dynamical system on the state space, which can be represented in either discrete or continuous time. This system has a natural structure for neural networks, where the state is first expanded into a high dimensional feature space followed by a linear mapping which represents the discrete-time map or the vector field as a linear combination of these features. Inspired by these observations, we implement several variations of neural ordinary differential equations (ODEs) and EDMD-DL, developed by combining different aspects of their respective model structures and training procedures. We evaluate these methods using numerical experiments on chaotic dynamics in the Lorenz system and a nine-mode model of turbulent shear flow, showing comparable performance across methods in terms of short-time trajectory prediction, reconstruction of long-time statistics, and prediction of rare events. We also show that these methods provide comparable performance to a non-Markovian approach in terms of prediction of extreme events.