Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Opportunities and Challenges of using Animals Videos in Reinforcement Learning
Paper and Code
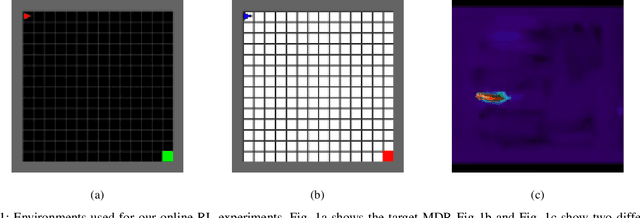
We investigate the use of animals videos to improve efficiency and performance in Reinforcement Learning (RL). Under a theoretical perspective, we motivate the use of weighted policy optimization for off-policy RL, describe the main challenges when learning from videos and propose solutions. We test our ideas in offline and online RL and show encouraging results on a series of 2D navigation tasks.
View paper on