 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn failures of RGB cameras and their effects in autonomous driving applications
Paper and Code
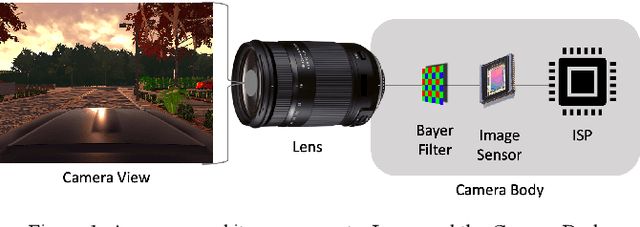
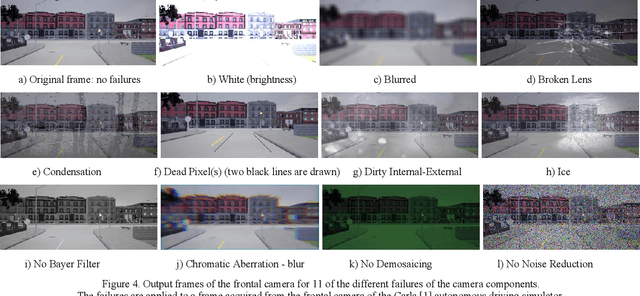
RGB cameras are arguably one of the most relevant sensors for autonomous driving applications. It is undeniable that failures of vehicle cameras may compromise the autonomous driving task, possibly leading to unsafe behaviors when images that are subsequently processed by the driving system are altered. To support the definition of safe and robust vehicle architectures and intelligent systems, in this paper we define the failures model of a vehicle camera, together with an analysis of effects and known mitigations. Further, we build a software library for the generation of the corresponding failed images and we feed them to the trained agent of an autonomous driving simulator: the misbehavior of the trained agent allows a better understanding of failures effects and especially of the resulting safety risk.