 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Credit Assignment in Hierarchical Reinforcement Learning
Paper and Code
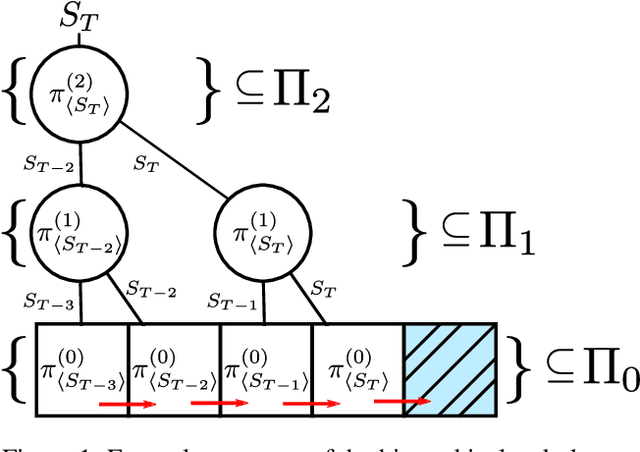



Hierarchical Reinforcement Learning (HRL) has held longstanding promise to advance reinforcement learning. Yet, it has remained a considerable challenge to develop practical algorithms that exhibit some of these promises. To improve our fundamental understanding of HRL, we investigate hierarchical credit assignment from the perspective of conventional multistep reinforcement learning. We show how e.g., a 1-step `hierarchical backup' can be seen as a conventional multistep backup with $n$ skip connections over time connecting each subsequent state to the first independent of actions inbetween. Furthermore, we find that generalizing hierarchy to multistep return estimation methods requires us to consider how to partition the environment trace, in order to construct backup paths. We leverage these insight to develop a new hierarchical algorithm Hier$Q_k(\lambda)$, for which we demonstrate that hierarchical credit assignment alone can already boost agent performance (i.e., when eliminating generalization or exploration). Altogether, our work yields fundamental insight into the nature of hierarchical backups and distinguishes this as an additional basis for reinforcement learning research.