 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOffline-to-online Reinforcement Learning for Image-based Grasping with Scarce Demonstrations
Paper and Code
Oct 19, 2024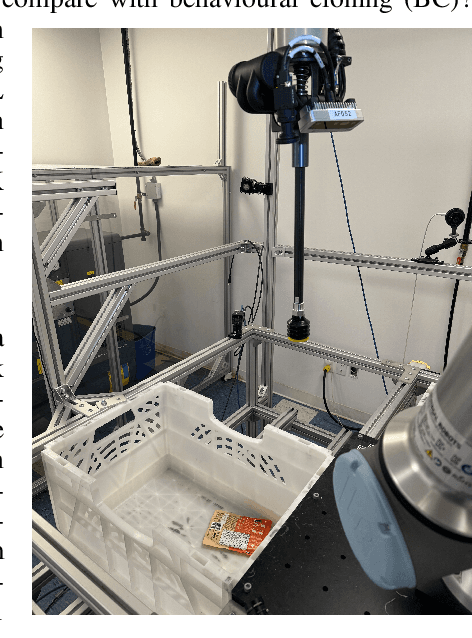
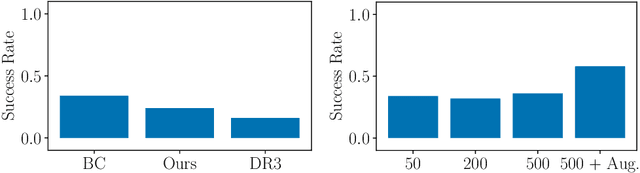
Offline-to-online reinforcement learning (O2O RL) aims to obtain a continually improving policy as it interacts with the environment, while ensuring the initial behaviour is satisficing. This satisficing behaviour is necessary for robotic manipulation where random exploration can be costly due to catastrophic failures and time. O2O RL is especially compelling when we can only obtain a scarce amount of (potentially suboptimal) demonstrations$\unicode{x2014}$a scenario where behavioural cloning (BC) is known to suffer from distribution shift. Previous works have outlined the challenges in applying O2O RL algorithms under the image-based environments. In this work, we propose a novel O2O RL algorithm that can learn in a real-life image-based robotic vacuum grasping task with a small number of demonstrations where BC fails majority of the time. The proposed algorithm replaces the target network in off-policy actor-critic algorithms with a regularization technique inspired by neural tangent kernel. We demonstrate that the proposed algorithm can reach above 90% success rate in under two hours of interaction time, with only 50 human demonstrations, while BC and two commonly-used RL algorithms fail to achieve similar performance.