Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObservable dynamics and coordinate systems for automotive target tracking
Paper and Code
Sep 21, 2014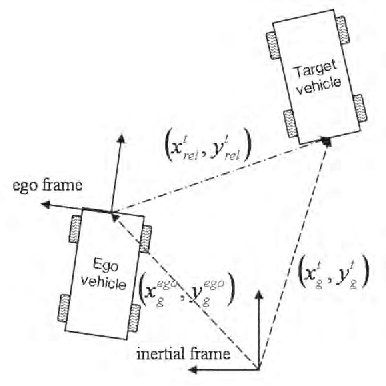

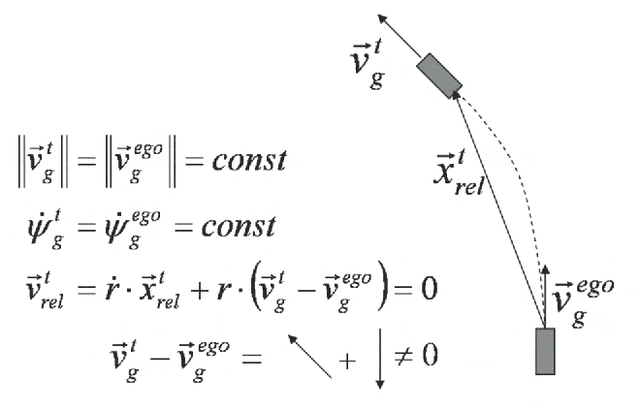

We investigate several coordinate systems and dynamical vector fields for target tracking to be used in driver assistance systems. We show how to express the discrete dynamics of maneuvering target vehicles in arbitrary coordinates starting from the target's and the own (ego) vehicle's assumed dynamical model in global coordinates. We clarify the notion of "ego compensation" and show how non-inertial effects are to be included when using a body-fixed coordinate system for target tracking. We finally compare the tracking error of different combinations of target tracking coordinates and dynamical vector fields for simulated data.
* Proceedings of the IEEE Intelligent Vehicles Symposium (2009)
741-746 * 6 pages, 3 figures
View paper on