 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection under Rainy Conditions for Autonomous Vehicles
Paper and Code
Jul 10, 2020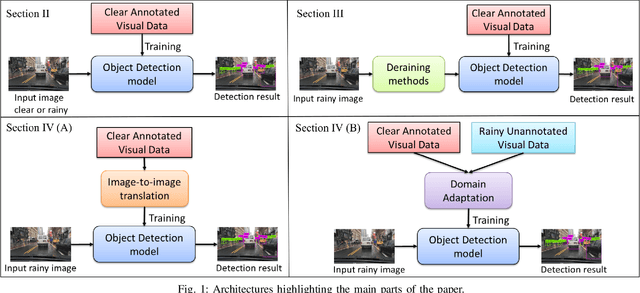

Advanced automotive active-safety systems, in general, and autonomous vehicles, in particular, rely heavily on visual data to classify and localize objects such as pedestrians, traffic signs and lights, and other nearby cars, to assist the corresponding vehicles maneuver safely in their environments. However, the performance of object detection methods could degrade rather significantly under challenging weather scenarios including rainy conditions. Despite major advancements in the development of deraining approaches, the impact of rain on object detection has largely been understudied, especially in the context of autonomous driving. The main objective of this paper is to present a tutorial on state-of-the-art and emerging techniques that represent leading candidates for mitigating the influence of rainy conditions on an autonomous vehicle's ability to detect objects. Our goal includes surveying and analyzing the performance of object detection methods trained and tested using visual data captured under clear and rainy conditions. Moreover, we survey and evaluate the efficacy and limitations of leading deraining approaches, deep-learning based domain adaptation, and image translation frameworks that are being considered for addressing the problem of object detection under rainy conditions. Experimental results of a variety of the surveyed techniques are presented as part of this tutorial.