 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection in Aerial Images with Uncertainty-Aware Graph Network
Paper and Code
Aug 24, 2022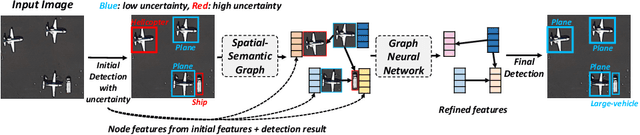
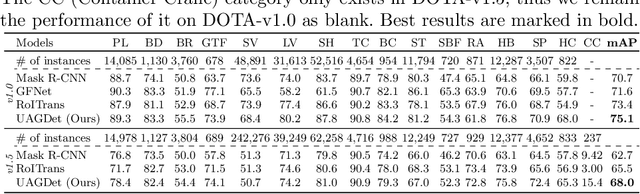


In this work, we propose a novel uncertainty-aware object detection framework with a structured-graph, where nodes and edges are denoted by objects and their spatial-semantic similarities, respectively. Specifically, we aim to consider relationships among objects for effectively contextualizing them. To achieve this, we first detect objects and then measure their semantic and spatial distances to construct an object graph, which is then represented by a graph neural network (GNN) for refining visual CNN features for objects. However, refining CNN features and detection results of every object are inefficient and may not be necessary, as that include correct predictions with low uncertainties. Therefore, we propose to handle uncertain objects by not only transferring the representation from certain objects (sources) to uncertain objects (targets) over the directed graph, but also improving CNN features only on objects regarded as uncertain with their representational outputs from the GNN. Furthermore, we calculate a training loss by giving larger weights on uncertain objects, to concentrate on improving uncertain object predictions while maintaining high performances on certain objects. We refer to our model as Uncertainty-Aware Graph network for object DETection (UAGDet). We then experimentally validate ours on the challenging large-scale aerial image dataset, namely DOTA, that consists of lots of objects with small to large sizes in an image, on which ours improves the performance of the existing object detection network.