 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeObject Detection and Sorting by Using a Global Texture-Shape 3D Feature Descriptor
Paper and Code
Feb 04, 2018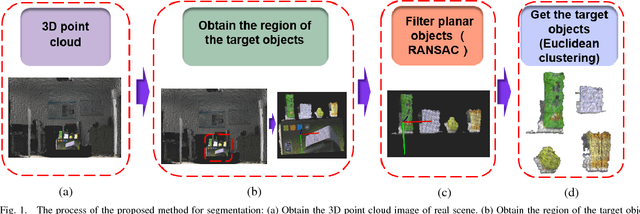
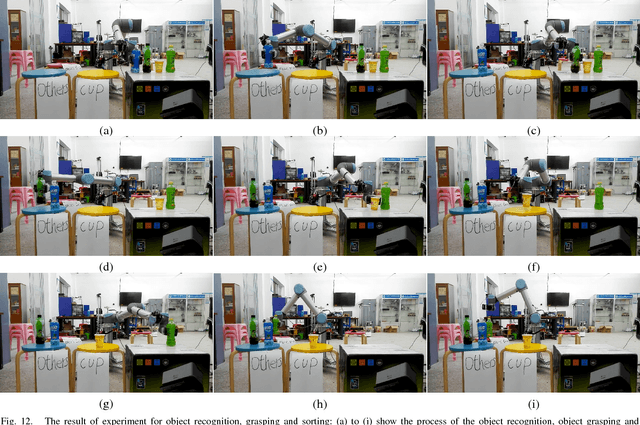
Object recognition and sorting plays a key role in robotic systems, especially for the autonomous robots to implement object sorting tasks in a warehouse. In this paper, we present a global texture-shape 3D feature descriptor which can be utilized in a sorting system, and this system can perform object sorting tasks well. Our proposed descriptor stems from the clustered viewpoint feature histogram (CVFH). As the CVFH feature descriptor relies on the geometrical information of the whole 3D object surface only, it can not perform well on the objects with similar geometrical information. Therefore, we extend the CVFH descriptor with texture information to generate a new global 3D feature descriptor. Then this proposed descriptor is tested for sorting 3D objects by using multi-class support vector machines (SVM). It is also evaluated by a public 3D image dataset and real scenes. The results of evaluation show that our proposed descriptor have a good performance for object recognition compared to the CVFH. Then we leverage this proposed descriptor in the proposed sorting system, showing that the proposed descriptor helps the sorting system implement the object detection, the object recognition and object grasping tasks well.