 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeO2S: Open-source open shuttle
Paper and Code
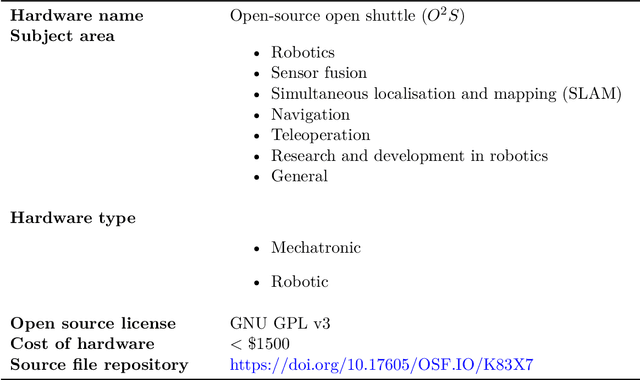
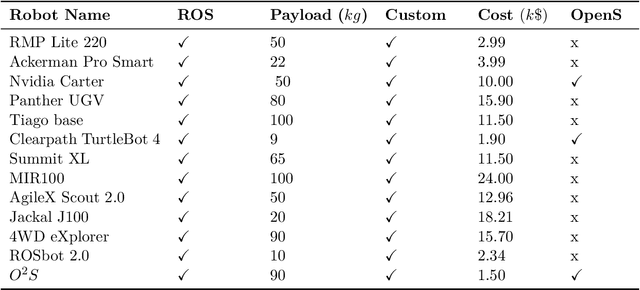
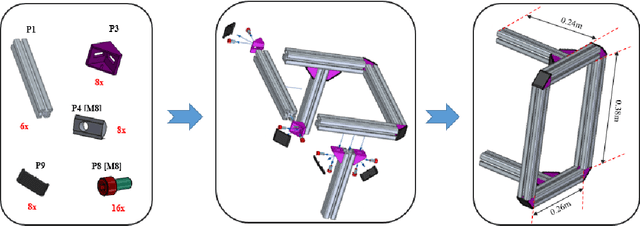
Currently, commercially available intelligent transport robots that are capable of carrying up to 90kg of load can cost \$5000 or even more. This makes real-world experimentation prohibitively expensive and limits the applicability of such systems to everyday home or industrial tasks. Aside from their high cost, the majority of commercially available platforms are either closed-source, platform-specific or use difficult-to-customize hardware and firmware. In this work, we present a low-cost, open-source and modular alternative, referred to herein as "open-source open shuttle (O2S)". O2S utilizes off-the-shelf (OTS) components, additive manufacturing technologies, aluminium profiles, and a consumer hoverboard with high-torque brushless direct current (BLDC) motors. O2S is fully compatible with the robot operating system (ROS), has a maximum payload of 90kg, and costs less than $1500. Furthermore, O2S offers a simple yet robust framework for contextualizing simultaneous localization and mapping (SLAM) algorithms, an essential prerequisite for autonomous robot navigation. The robustness and performance of the O2S were validated through real-world and simulation experiments. All the design, construction and software files are freely available online under the GNU GPL v3 license at https://doi.org/10.17605/OSF.IO/K83X7. A descriptive video of O2S can be found at https://osf.io/v8tq2.